
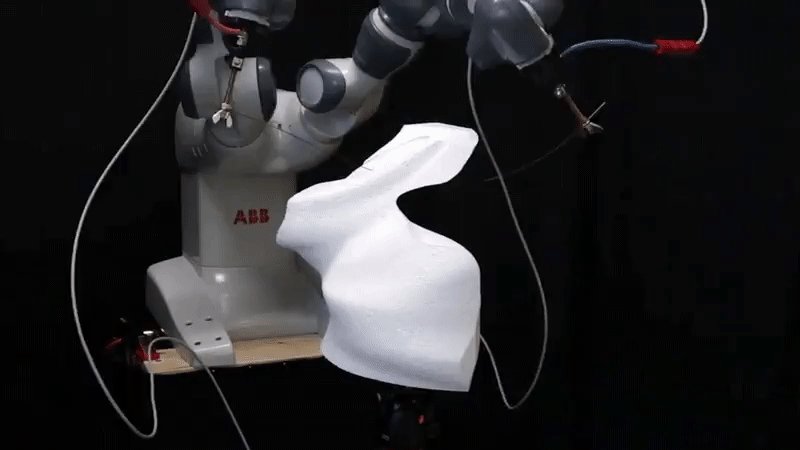
에단취리히대학 연구소(Computational Robotics Lab)가 스티로폼을 마치 예술가처럼 조각할 수 있게 해주는 로봇을 개발하고 있다. 이중 팔 로봇이 와이어를 교묘하게 다루면서 조각품을 만들어내는 것. 팔 2개 움직임을 통해 스티로폼을 깎고 전열선을 구부리거나 왜곡시켜 복잡한 곡선을 한 3D 모델을 재현하는 것이다.
유미 IRB 14000(YuMi IRB 14000)이라는 이 로봇에는 7개 자유도로 움직이는 팔 2개가 있고 그리퍼마다 탄성이 있는 금속 와이어 끝을 잡고 있다. 팔 2개가 움직일 때 전열선의 정확한 형상을 계산하고 모델링을 해야 한다.
로봇팔 동작을 습득하는 것과 전열선의 특수한 곡선을 재현할 수 있는 것 외에도 전열선은 각도 이상으로 구부리면 손상될 수 있기 때문에 한계를 파악하고 해당 범위 내에서 절단 계획을 세울 필요가 있다. 3D 모델을 분석해 특정 순서로 스티로폼을 제거하는 등 일련의 곡선 절단을 계산하는 도구를 개발했다. 이런 순서는 모델 복잡성을 고려해야 한다. 이번 연구는 3D 프린팅에 대해 독특한 접근 방식을 취한 것으로 기존처럼 소재 레이어를 쌓아올리는 형태와는 다르다. 관련 내용은 이곳에서 확인할 수 있다.






















