
스탠포드대학 연구팀이 마치 매처럼 나뭇가지를 움켜쥐고 있는 것처럼 3D프린팅을 이용해 SNAG(stereotyped nature-inspired aerial grasper), 자연에서 영감을 얻은 집게가 될 수 있는 물건 잡기 로봇을 만들었다.
개발 목적은 야생 생체 관찰이나 구조에 도움이 되기 위한 것이다. 하지만 연구팀이 만든 건 하반신 뿐이다. 하늘을 날게 하려면 상반신을 드론과 합체시킬 수 있다. 로봇은 착지할 때 무릎과 고관절을 구부려 충격을 완화하고 알고리즘을 이용해 균형을 잡는다. 개발자는 코로나19로 인해 자연이 풍부한 오레곤으로 이사했고 로봇을 다양한 환경에서 테스트할 수 있었다고 한다.
드론을 비롯해 대부분 비행 로봇은 날아가지 않기 때문에 전력을 계속 소비한다. 하지만 나뭇가지에 머물러 쉬는 로봇이라면 그 사이 전력을 사용하지 않고 사용 시간이 늘어난다는 장점이 있다. 이를 통해 산불 등 감시가 용이해진다.
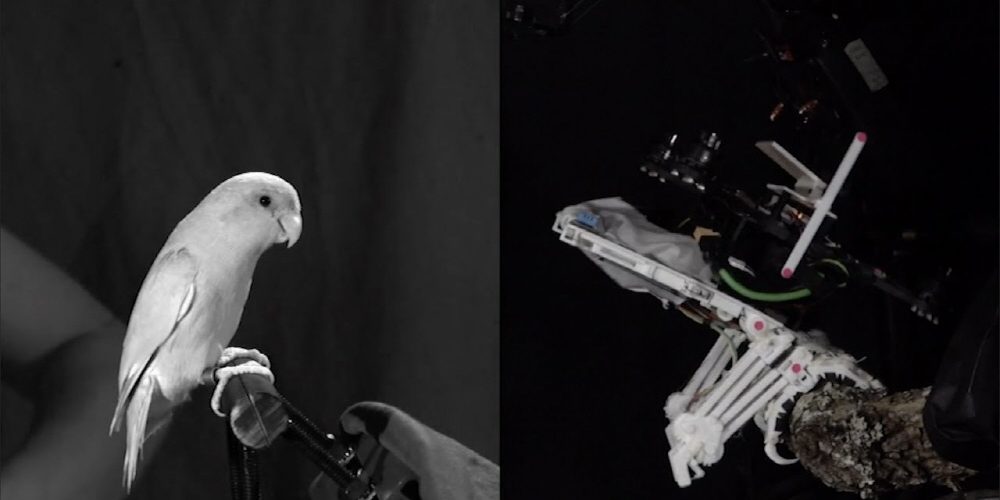
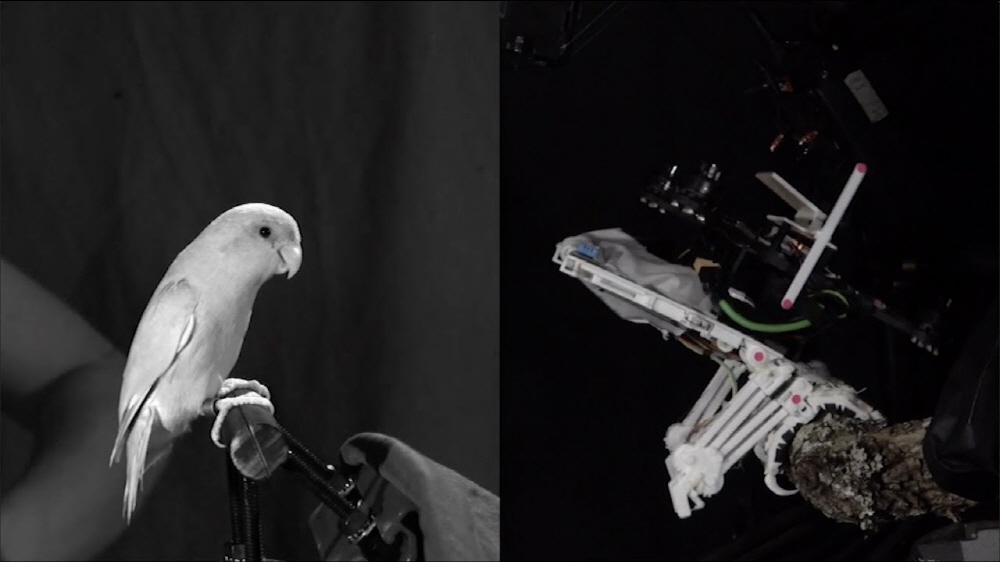
SNAG를 만들 때에는 실제 잉꼬를 이용해 착지 모습을 과학적으로 분석했다. 착지 과정은 간단해 보이지만 여기에 센서를 붙여 여러 소재로 나무를 시험하거나 초고속 카메라 여러 대로 촬영해 새를 연구했다.
새가 착지하는 건 어떤 표면에서도 공중에서 움직임이 같았다. 손가락은 앞 3개, 뒤 1개로 잉꼬 전후 2개씩과는 다르지만 어떤 쪽도 기능이 같았다고 한다. 새가 다리를 움켜잡는 것 외에도 날개로 감속하거나 균형감을 취한다. 아직까지 날개 유무는 과제가 아니고 앞으로 이륙 전 상황 판단과 비행 제어 개선에 초점을 맞출 계획이라고 한다. 관련 내용은 이곳에서 확인할 수 있다.























