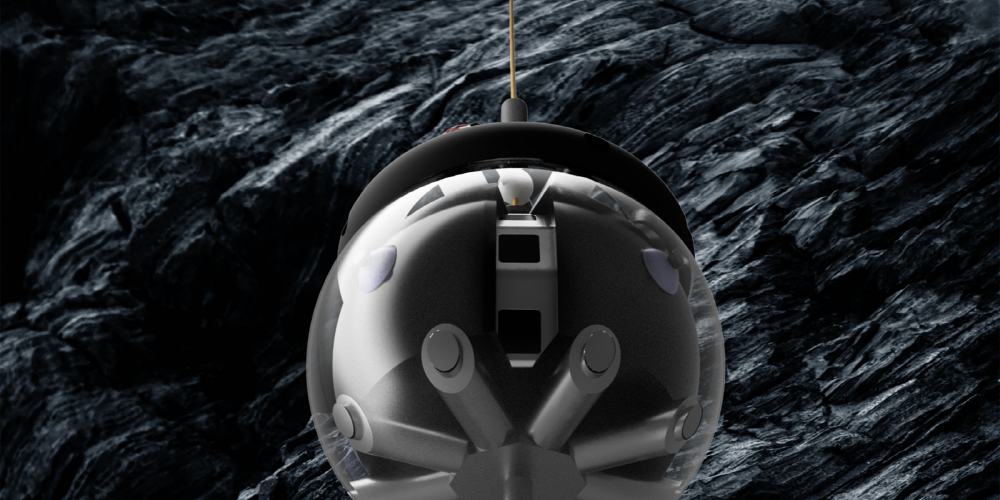

독일 율리우스막시밀리안대학 뷔르츠부르크 대학(JMU. Julius-Maximilians-Universität of Würzburg)과 유럽우주국 ESA가 달 동굴을 탐험하는 구형 로봇인 다이달로스(Daedalus) 설계에 협력하고 있다.
달 표면에 깊은 세로 구멍과 홈이 일부 발견되고 있어 앞으로 달에 체류할 인류에게는 이런 구멍이 우주 방사선이나 미소 운석, 극단적 표면 온도에 대한 천연 방패막이 될 수 있으며 그대로 거주지가 될 가능성도 있다.
이 직경 46cm짜리 구형 로봇은 달 표면에 깊은 세로 구멍에 케이블로 내리며 내부에 있는 물질이나 달에서 생활에 필요한 얼음 등을 찾는다. 또 다이달로스는 라이더와 방사선량 측정기, 온도 센서로 구멍 내부를 맵핑하고 본체에서 로봇팔을 뻗쳐 장애물을 제거하는 것 같은 작업도 가능하다.
깊은 구멍 내부에 내려가면 상황에 따라선 외부와 통신할 수 없게 되는 일도 있지만 다이달로스는 케이블을 와이파이 수신기로 작동시킬 수 있어 내부 모습을 외부에서 알 수 있다. 이 구형 로봇은 ESA가 다루는 달 지형 탐사 콘셉트 중 하나로 달에 보내지는 게 정해져 있는 건 아니다. 하지만 달 천연 지형을 거주지로 우주비행사 체류가 가능하게 된다면 처음부터 기지를 건설하기 위한 자재와 노력을 크게 절약할 가능성이 있으며 이 로봇이 해당 기능을 처리한다면 실제로 개발될 가능성이 높을 수도 있다. 관련 내용은 이곳에서 확인할 수 있다.