로봇은 주로 시각과 촉각이라는 2가지 기본 감각에 의존한다. 하지만 이런 촉각조차도 선행하는 시각 속도를 따라잡기에는 아직 시간이 걸릴 것으로 보인다. 현재 카네기멜론대학 연구팀은 기계가 주위 세계에 대한 인식을 높이는데 도움을 줄 수 있는 잠재적 추가 감각으로 청각에 주목하고 있다.
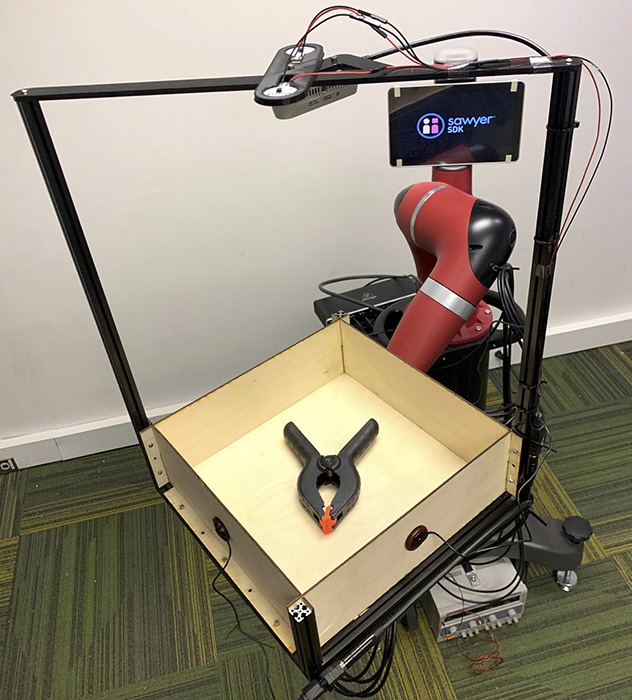
새로운 실험은 리싱크로보틱스(Rethink Robotics)의 소이어(Sawyer)를 이용해 금속 트레이에서 물체를 움직여 회전하거나 미끄러지거나 측면에 부딪쳤을 때 발생하는 소리를 수집하고 있다. 공구와 나무 블록, 테니스공, 사과 등 60종류 물체를 통한 1만 5,000회 상호 작용을 기록, 정리했다.
연구팀이 틸트봇(Tilt-Bot)이라고 명명한 이 로봇은 금속 드라이버와 렌치 등 비교적 차이가 작은 물체를 결정할 때에도 76% 정확도로 물체를 식별할 수 있다. 소리 데이터를 이용한 것으로 이 로봇은 물체 재질을 판정할 수 있다.
물론 이 연구는 아직 초기 단계이며 첫 번째 결과가 공개된 정도지만 연구는 로봇 감지 도구에 새로 소리 감지를 이용할 수 있는 가능성을 모색하고 있다. 다양한 가능성 가운데 하나로 지팡이도 포함되어 있다. 기계가 재질을 더 정확하게 판단하기 위해 물체를 두드릴 수도 있다는 것이다. 관련 내용은 이곳에서 확인할 수 있다.