

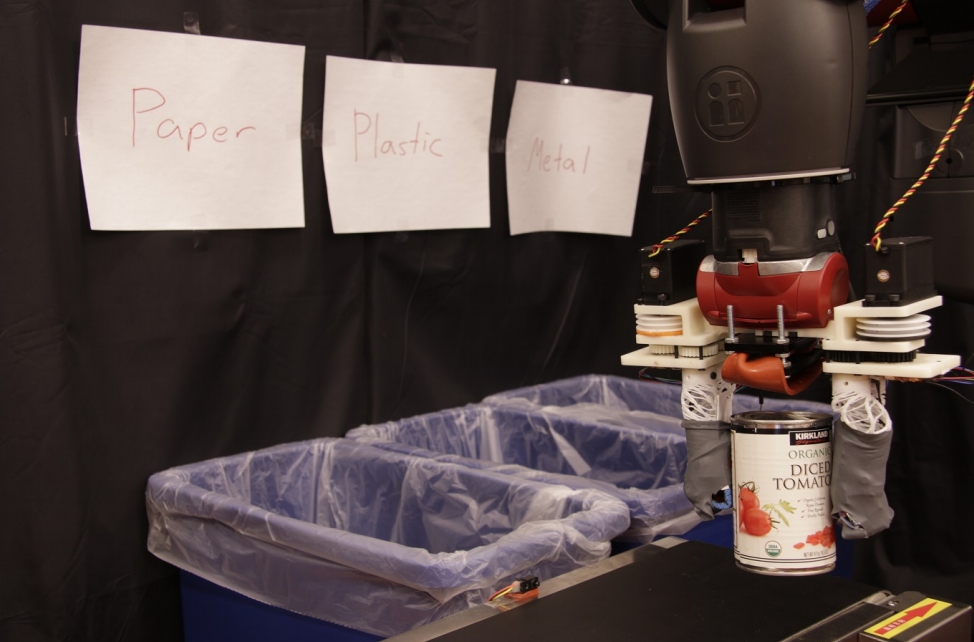
로사이클(RoCycle)은 MIT 컴퓨터과학 및 인공지능 연구소 CSAIL(Cognitive Science Association for Interdisciplinary Learning)이 개발한 쓰레기 분류 로봇이다. 기계가 가릴 수 없는 종이와 플라스틱, 금속을 사람처럼 촉감으로 인식하고 분별하는 로봇인 것.
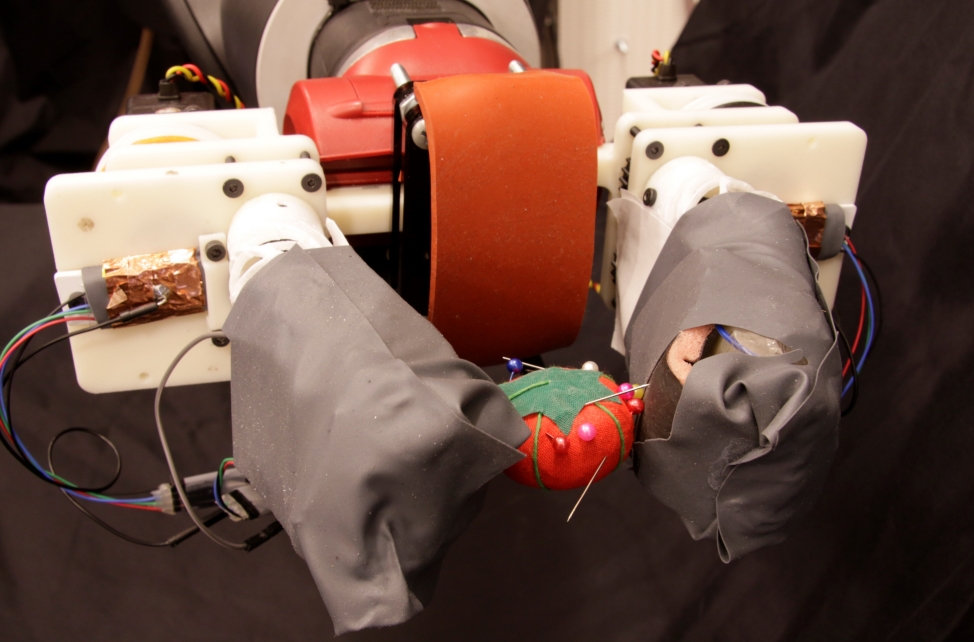
이 로봇은 로봇팔에 센서를 갖춰 잡은 물체의 성질을 판단한다. 왜곡 센서가 물건 크기를 따지고 압력 센서 2개가 표면 촉감을 인식한다. 센서는 전도도를 측정하는데 이용하며 이를 통해 금속 여부도 파악할 수 있다.
손바닥에 닿는 부분에는 스트레칭으로 두께를 더하는 소재를 이용했고 비틀림 방향으로 힘을 가하면 두께를 더해 강하게 쥘 수 있도록 설계했다. 또 오른쪽과 왼쪽 반대 방향으로 꼬인 성격도 배분해 더한 힘 반동으로 원래 위치로 회복할 수 있도록 에어펌프 등을 이용할 수 있다.
다만 아직까지는 로사이클이 조만간 도심에서 쓰레기 수집이나 재활용 업무를 할 수 있는 건 아니다. 실험에선 쓰레기 하나하를 일정하게 배치했고 특정 위치에서 정지하도록 했다. 이렇게 하면 로사이클은 85% 정확도로 쓰레기를 분류할 수 있다. 하지만 실제 재활용 공장을 본뜬 컨베이어벨트 같은 곳에선 이 같은 정확도는 65%로 저하된다.
또 실제 작업에선 종이 상자 안에 맥주캔이 들어있는 일도 흔하다. 로사이클은 이럴 때에는 판단을 잘못 할 수 있다. 이런 문제는 개발을 진행하면 해결할 수 있을지 모른다. 따라서 언젠가는 쓰레기 분리 수거 현장에 로봇이 등장하게 될지도 모른다.
로봇 진출이 사람의 일자리를 빼앗는다는 우려도 있지만 컨베이어벨트로 쏟아지는 쓰레기 분류가 많은 도시라면 일손이 필요할 수 있다. 관련 내용은 이곳에서 확인할 수 있다.




















