하버드 와이즈응용생물학공학연구소가 서로를 찾아 이동하는 자립식 물고기형 수중 로봇을 개발했다. 이 로봇은 협력해 일을 해내거나 조용히 무리를 지어 이동하기도 한다.
공중 드론이 다양한 산업 분야에서 활용되고 있는 것과 마찬가지로 수중 드론은 친환경 운송 등 수중이라는 어려운 환경에서 혁신을 일으킬 가능성을 지니고 있다. 이에 따라 지난 몇 년간 자립식 수중 이동 장치 AUV가 등장했지만 전형적인 어뢰형이었다. 개방 공간에서 주행에는 효율적이지만 산호초 같은 곳을 구석구석 돌아다니는 데에는 적합하지 않다.
이에 연구팀은 자연을 모방한 로봇을 구상했다. 연구팀은 형상 뿐 아니라 물고기가 동료와 상호 작용하는 방법까지 모방할 수 있도록 했다. 집단적인 일관성을 일으키는 인공 에이전트를 만들어 집단 전체가 에이전트 하나처럼 행동하게 하겠다는 것이다.
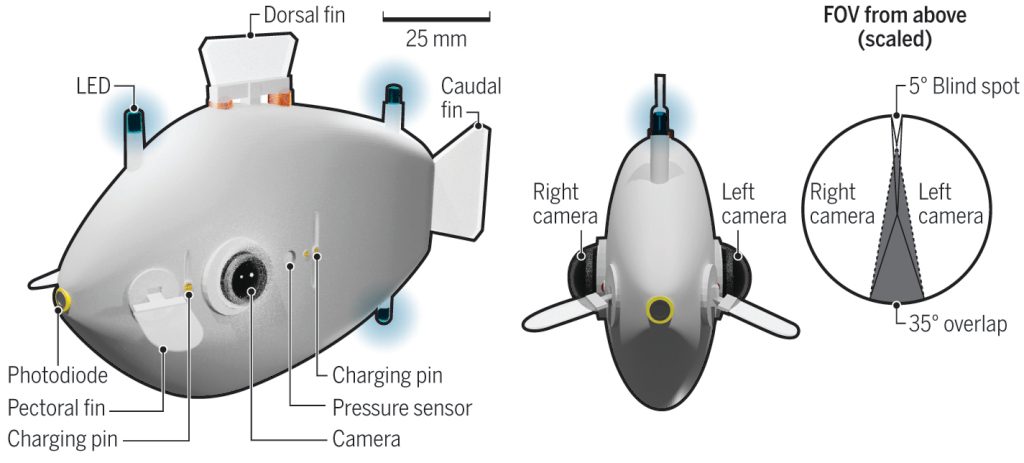
블루스웜(Blueswarm)은 물고기 형태로 3D프린터로 출력한 작은 블루봇(Bluebots) 집단이다. 프로펠러가 아니라 지느러미를 갖고 눈 대신 카메라를 갖추고 있다. 진짜 물고기와 착각하는 사람은 없겠지만 보통 물고기에게 2m 가까이 금속관을 갖춘 후방 프로펠러가 큰 소리를 내며 도는 걸 보는 것보다 훨씬 두려움은 적을 수 있다. 블루봇은 자연 속 혁신인 생물 발광도 모방하고 어떤 물고기와 곤충이 서로 신호를 보내게 LED 불빛을 내고 LED 펄스는 로봇끼리 위치와 주위 상황에 따라 변경된다.
카메라와 첨단 광센서에 의한 간단한 검출 기궁와 기본적인 수영 동작, LED를 이용해 블루스웜은 자동으로 그룹 행동을 한다. 로봇 집단은 뭔가 물건을 찾는 간단한 작업을 공동 수행할 수도 있다. 산호초 같은 자연물이나 해양 생물을 위협하지 않고 안전하게 접근할 수 있기 때문에 건강 상태를 모니터링하고 카메라에 보이는 물체를 찾을 수 있다. 또 선박 밑을 유영하면서 효율적으로 선체를 검사하거나 수색, 구조에 도움을 줄 수도 있다.
연구팀은 이번 연구를 통해 고급 로봇 집단을 만들 뿐 아니라 자연 집단 지능에 대해서도 배울 수 있기를 기대한다고 밝히고 있다. 관련 내용은 이곳에서 확인할 수 있다.