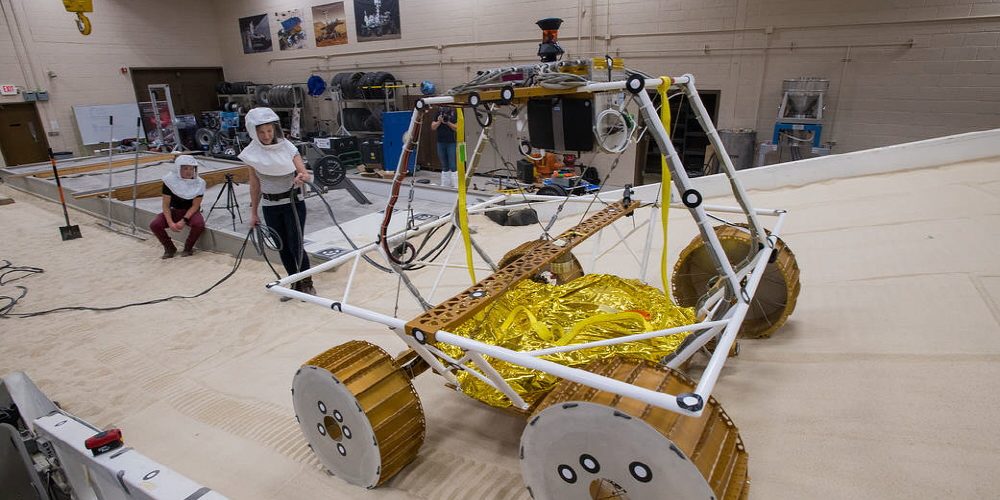
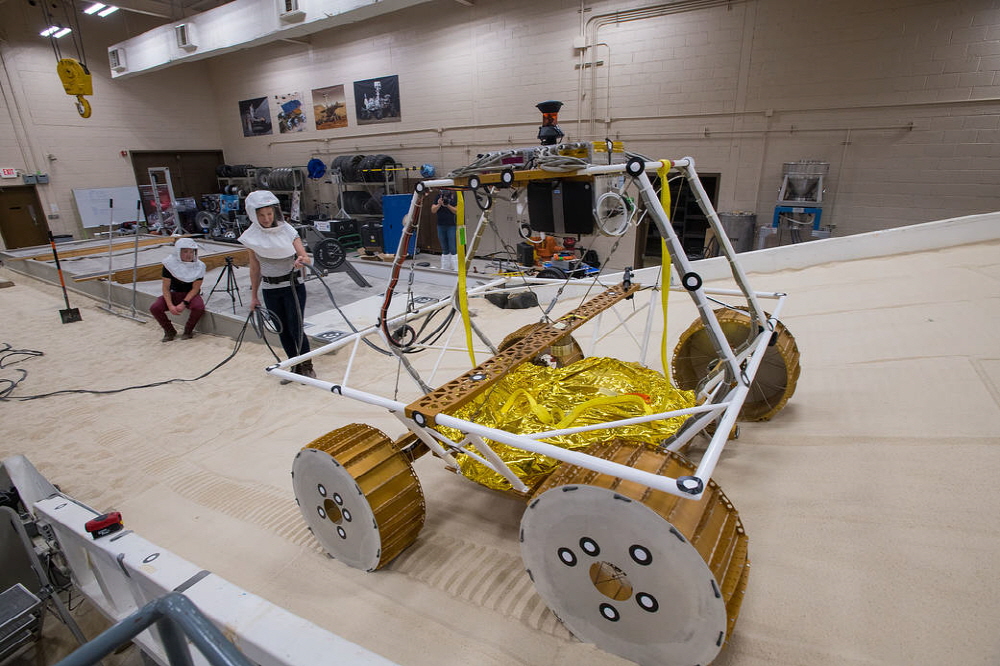
미 항공우주국 나사(NASA)가 오하이오에 위치한 글렌연구센터에 설치되어 있는 모의 달 환경 SLOPE(Simulated Lunar Operations Laboratory)에서 달 탐사 로버 바이퍼(VIPER) 엔지니어링 모델 주행 테스트를 실시했다.
바이퍼는 아르테미스 계획 일환으로 2022년 달에 착륙하고 남극에 있다고 여겨지는 얼음을 찾을 계획이다. 이 날 바이퍼를 개발하는 존슨우주센터 연구팀은 글렌연구센터 팀과 함께 거의 프레임과 바퀴만으로 구성된 바이퍼 엔지니어링 모델을 조작하고 로버에 필요한 바퀴의 트랙션 값, 다양한 경우를 상정한 운영을 위한 소요 전력의 결정, 가파른 경사 주파 방법 비교 검토 등을 실시했다.
바이퍼에는 길이 1m 드릴을 포함한 4가지 과학 장비를 활용해 몇 마일을 주행하면서 다양한 토양 샘플을 조사하고 미래 달 기지에서 임무에 필요한 만큼의 물이 있는지를 확인한다. 아르테미스 프로젝트는 바이퍼 뿐 아니라 우주비행사가 달에 직접 내려 얼음 탐색을 실시할 예정이다.
바이퍼는 나사 내외에서 공동으로 개발되고 있다. 프로젝트를 이끄는 건 실리콘밸링에 위치한 에임스연구센터이며 이곳에서 미션과 시스템 엔지니어링, 로버 운영과 소프퉤어 개발을 하고 있다. 또 로버 본체는 플로리다 케네디우주센터에서 개발하고 캘리포니아 허니비로보틱스(Honeybee Robotics)가 상업 파트너로 참여하고 있다. 예정대로 개발과 발사 프로그램이 진행된다면 2022년 12월 활동을 시작하게 된다. 관련 내용은 이곳에서 확인할 수 있다.