리틀 헤르메스(Little HERMES)는 MIT 연구팀이 개발 중인 인간의 움직임을 순간적으로 모방하는 원격 조작 2족 보행 로봇이다.
리틀 헤르메스는 인간에 필적하는 모터와 의사 결정 능력을 갖춘 완전 자율 로봇을 구축하는 건 아직 과제가 너무 많다는 점을 들어 인간의 판단에 의해 결정되는 원격 조작으로 재해 정찰이나 구조를 할 수 있게 하려 한다.
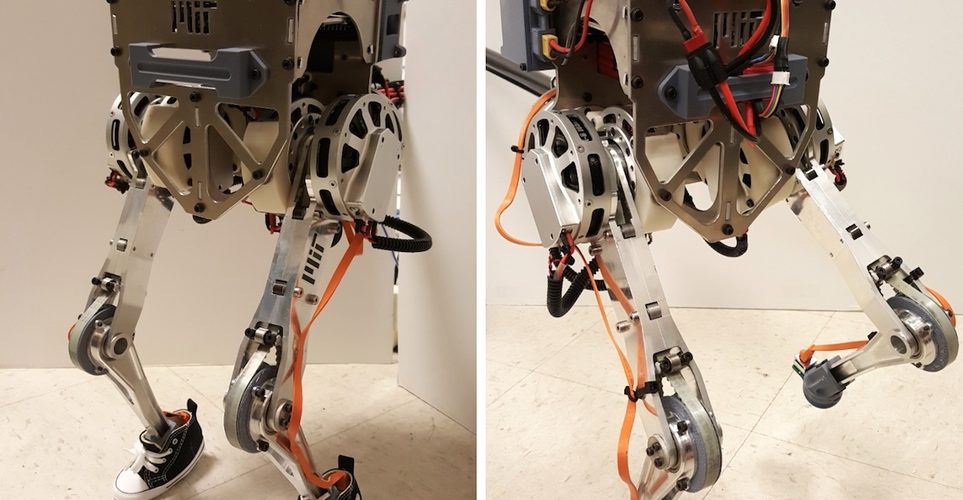
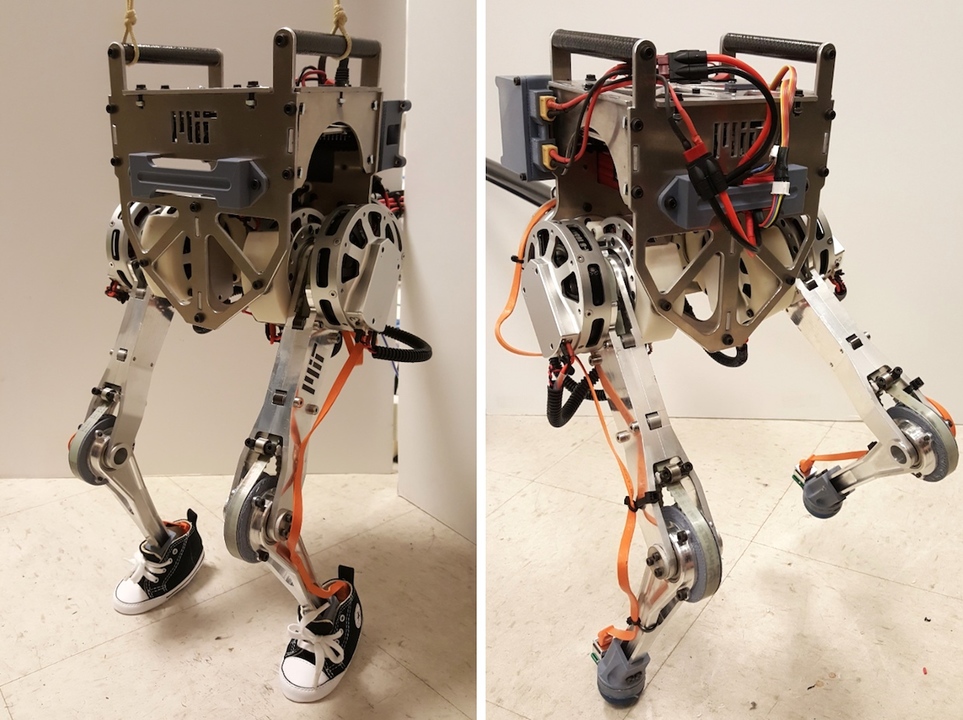
리틀 헤르메스는 무게를 최소화하기 위한 강성 경량 프레임에 충격을 견딜 수 있게 설계한 높은 토크를 생성할 수 있는 사용자 정의 액추에이터와 센서, 내충격성을 갖춘 경량 다리 센서 등 다리 운동 성능을 높은 수준으로 작동시키는 메커니즘을 담고 있다.
인간 쪽에는 몸통 움직임을 추적하기 위해 익스트림 스포츠 등에서 착용하는 보호대를 차용해 버팀대를 펴고 공중에 고정시켰다. 또 다리도 움직임을 추적하는 가동부를 붙이고 이를 액추에이터에 연결했다. 여기에 인간의 균형을 곧바로 피드백해주는 인터페이스도 적용했다. 이를 통해 마치 인간은 영화 레디플레이어1처럼 다른 장소에서 아바타를 조종하는 것 같은 경험을 할 수 있다.
리틀 헤르메스는 무거울 것 같은 몸통에 가녀린 다리를 갖췄지만 연속 점프도 무난하게 처리할 수 있다. 세그웨이처럼 쓰러지는 방향과 반대로 무게 중심을 이동시키면서 점프를 해내는 것. 하지만 리틀 헤르메스에서 가장 기대되는 건 MIT가 만들고 있는 4족 보행 로봇인 치타3(Cheetah 3)이나 소형 버전인 미니 치타와 어떤 식으로든 합체하면 앞으로 4족으로 고속 이동하면서 재해 현장에선 2족 보행형으로 변환하는 하이브리드 변형 로봇 개발을 고려하고 있다는 것이다. 관련 내용은 이곳에서 확인할 수 있다.