
이족보행으로 다양한 동작을 수행하는 휴머노이드 로봇에게 넘어진 자세에서 일어서는 능력은 중요하다. 중국과 홍콩 연구팀이 휴머노이드 로봇이 초기 자세와 환경에 상관없이 빠르게 일어설 수 있는 AI 프레임워크 HoST(Humanoid Standing-up Control)를 개발하고 실제로 HoST를 탑재한 휴머노이드 로봇이 모든 상황에서 일어서는 영상을 공개했다.
휴머노이드 로봇은 주로 인간과 같은 이족보행으로 이동하고 다양한 동작을 수행하기 때문에 넘어진 상태나 앉은 자세에서 일어서는 동작을 잘 제어해야 한다. 하지만 기존 접근법은 하드웨어 제약을 간과하거나 미리 정의된 특정 환경에서만 작동하는 등 현실 세계 상황에 적합하지 않았다.
상하이 교통대학과 홍콩대학 등 연구팀은 일어서기 제어를 처음부터 학습하는 강화 학습 프레임워크 HoST를 개발했다. 연구팀은 HoST의 일어서기 제어 학습에서 보상 함수를 4개 그룹으로 분류해 개별 최적화를 수행하고 부드러운 동작을 유지하고 불규칙한 움직임을 방지하는 제한을 뒀다.
연구팀은 먼저 엔비디아가 개발한 물리 시뮬레이션 환경 아이작 짐 시뮬레이터(Isaac Gym simulator)를 사용해 훈련을 진행한 뒤 중국 로봇 개발 기업 유니트리(Unitree) 휴머노이드 로봇인 유니트리 G1에 배포해 실제 환경에서 테스트를 실시했다.
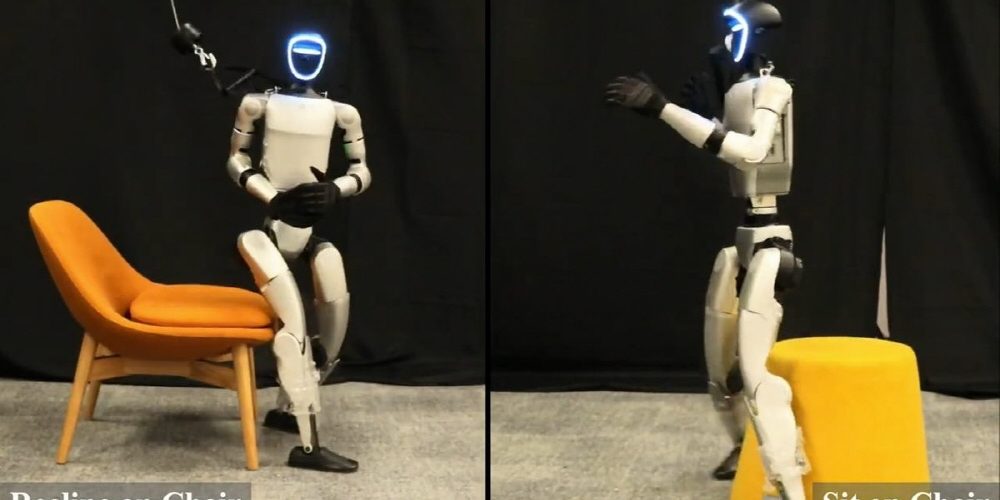
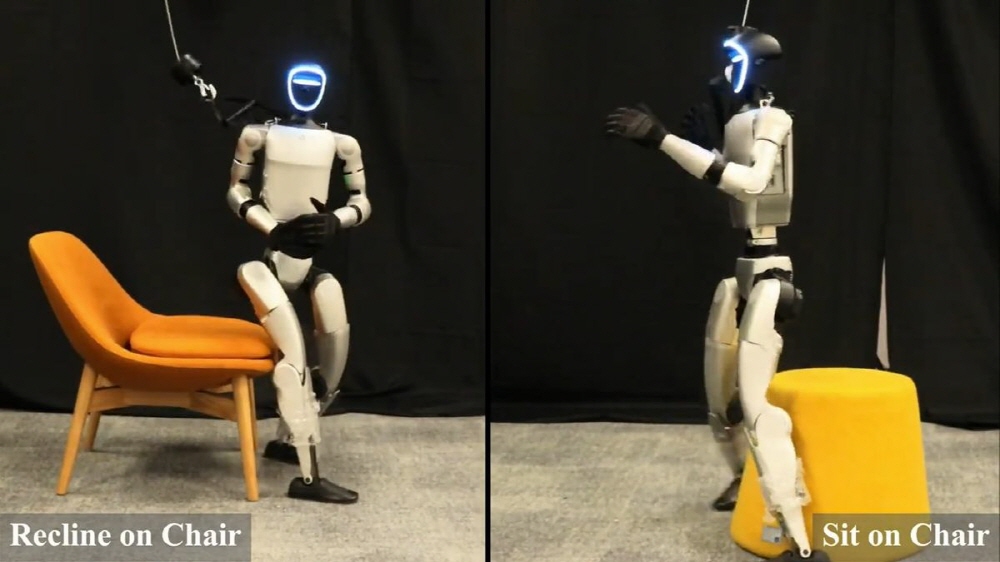
HoST가 적용된 휴머노이드 로봇은 누워있는 상태 뿐 아니라 다양한 자세에서 일어설 수 있다. 무릎 아래를 단차에 내리고 오른쪽은 상체를 벽에 기대고 있는 자세에서도 각각 자연스러운 동작으로 일어선다. 로봇만의 특이한 움직임이 아니라 인간도 비슷하게 할 법한 동작이다.
연구팀은 자갈길, 잔디밭 등 다양한 상황에서도 테스트를 진행했다. 실내 환경에서도 유사한 테스트를 수행했으며 10.5도 경사로 위와 같은 특수한 상황에서도 HoST 탑재 휴머노이드 로봇은 문제없이 일어설 수 있었다.
6kg 배낭을 메거나 소프트 쿠션 위에서도 일어설 수 있고 일어설 때 손으로 밀거나 외부에서 힘을 가하는 상황에서도 무사히 일어선다. 배후에서 물건을 충돌시켜도 괜찮았고 경사로 위에서 짐을 들고 일어설 때 힘을 가해도 성공적으로 일어섰다.
연구팀은 휴머노이드 로봇 실험 결과는 다양한 현실 세계 시나리오에서 부드럽고 안정적이며 견고한 일어서기 동작을 보여준다며 이번 연구는 기존 휴머노이드 시스템에 일어서기 제어를 통합할 수 있는 길을 열었으며 실제 세계 응용 가능성을 확대할 수 있다고 밝혔다. 관련 내용은 이곳에서 확인할 수 있다.





















