
연구실에서 배양한 쥐 근육 조직을 로봇에 통합해 원격 조작으로 움직일 수 있는 설계 방법이 고안됐다. 어떤 방향으로든 움직일 수 있으며 비슷한 연구 중 가장 빠른 속도로 진화하고 있다.
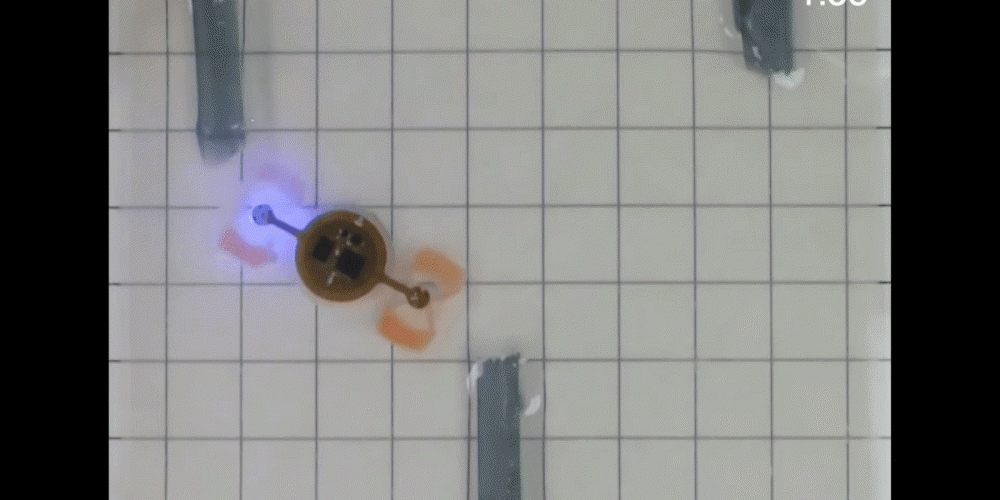
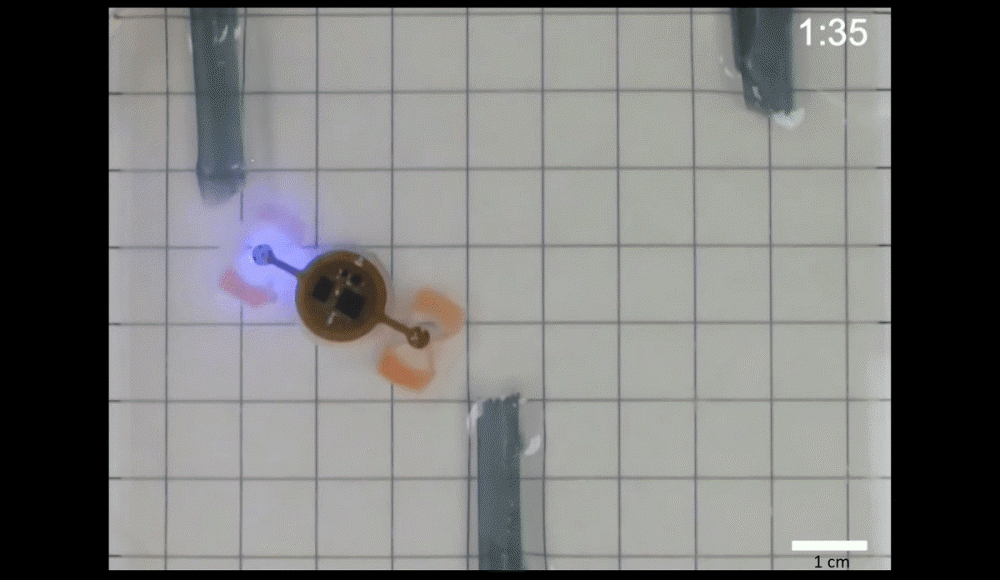
일리노이대학 연구팀이 개발한 바이오 하이브리드 로봇은 쥐 근육 세포, 세포 배양에 사용되는 스캐폴드, 무선 LED 제어 칩 3가지 주요 부품을 조합해 만든 로봇이다. 로봇에 내장한 근육 조직은 LED 칩에서 방출되는 빛으로 자극을 받아 수축한다. 이렇게 되면 근육 조직으로 연결된 스캐폴드가 왜곡되며 로봇이 움직이기 시작한다. 어떤 방향으로든 움직일 수 있다.
이번 설계는 기존 기술을 쇄신해 로봇이 움직이는 속도가 가장 빠르다고 한다. 연구팀은 다른 부품이 잘 작동하도록 구조를 재설계해야 했다며 더 기동적이며 새로운 연구를 위한 출발점이 될 것이라고 밝혔다.
연구팀은 신경세포를 배양해 시스템에 편입, 로봇이 스스로 계산해 직접 조종할 수 있도록 하는 걸 다음 목표로 하고 있다고 한다. 관련 내용은 이곳에서 확인할 수 있다.























