4족 보행 로봇 스팟(Spot)과 상용 물류 로봇 스트래치(Stretch) 등 다양한 로봇을 개발해온 보스턴다이내믹스가 휴머노이드 로봇 아틀라스(Atlas)를 완전 전동식으로 업그레이드했다. 아틀라스는 그동안 유압 구동 방식을 사용했지만 신형 아틀라스는 완전 전동식 구동 방식으로 바뀌었다. 신형 아틀라스는 실제 세계 응용 분야를 위해 설계된 완전 전동식 로봇으로 보스턴다이내믹스가 진행한 수십 년간에 이르는 로봇 개발 경험을 바탕으로 개발됐다.
보스턴다이내믹스는 신형 아틀라스에 대해 산업계에서 가장 어려운 과제를 해결할 수 있는 가장 능력 있고 유용한 이동 로봇을 제공하겠다는 약속을 더 강화하는 것이라고 밝혔다. 또 세계에서 가장 다이내믹한 휴머노이드 로봇이 연구소, 공장, 일상생활 속에서 실제로 어떻게 활약할지 기대해 달라고 덧붙였다.
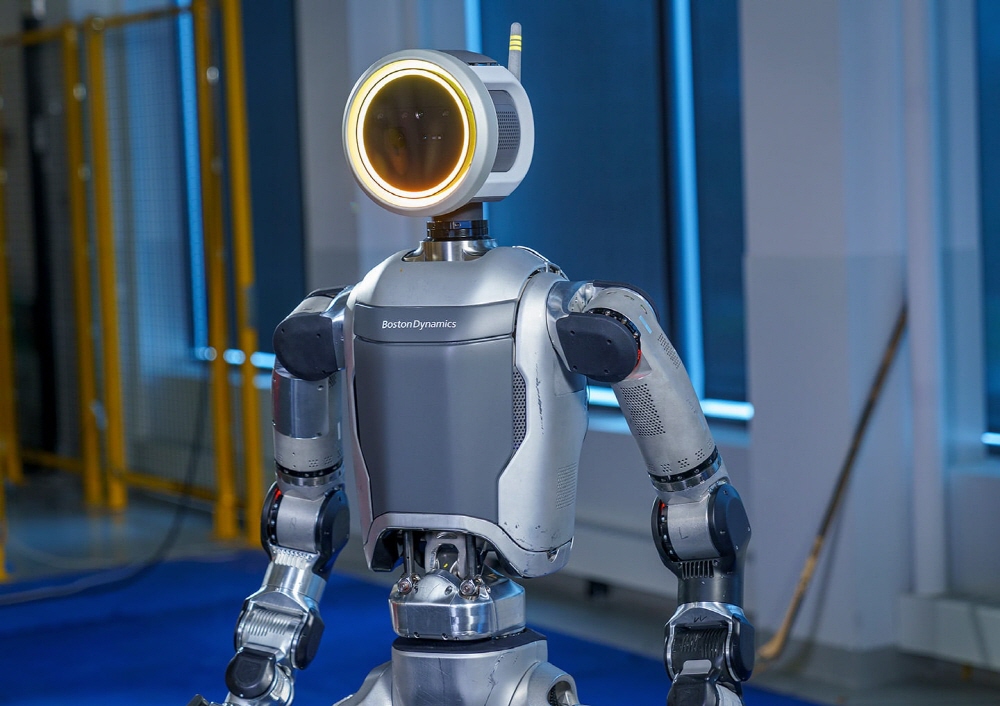
신형 아틀라스는 몸통을 눕힌 채로 다리를 구부렸다가 몸을 일으키는 모습에서 인간으로는 불가능한 관절 가동 범위와 힘을 느낄 수 있다. 머리 부분에는 원형 조명이 달려있다.
신형 아틀라스는 이전 유압 구동 방식 아틀라스에 비해 관절 가동 범위가 넓어져 무겁고 불규칙한 물체를 들어 올리는 동작 등이 더 안정적이다. 보스턴다이내믹스는 고객 환경에서 예상되는 다양한 작업 요구 사항을 충족하기 위해 새로운 버전을 탐색할 것이라고 언급했다.
보스턴다이내믹스는 스팟이나 스트래치, 신형 아틀라스 등 로봇 전체를 관리할 수 있는 통합 플랫폼인 오빗(Orbit)이라는 소프트웨어를 출시했다. 지금은 스팟만 오빗으로 관리되고 있지만 향후 스트래치와 신형 아틀라스도 이 엔터프라이즈 솔루션에 통합 예정이다.
보스턴다이내믹스는 신형 아틀라스가 전신 가동성과 양손 조작 한계를 높이는 혁신과 연구개발 역사에 기반하고 있다고 설명했다. 또 신형 아틀라스는 인간 능력을 초월하는 움직임을 보여줄 것이라며 수십 년에 이르는 실전 경험과 첫 원칙 접근법을 결합해 보스턴다이내믹스는 실제 응용 분야에서 단조롭고 더러우며 위험한 작업을 수행할 수 있는 고유한 능력을 갖춘 로봇을 제공할 수 있다고 확신한다고 밝혔다.
다만 신형 아틀라스 상용화 시기에 대해선 뛰어난 엔지니어링이 필요하다며 곧바로 시장에 출시할 계획은 없어 보인다. 관련 내용은 이곳에서 확인할 수 있다.