국제우주정거장 ISS는 외계 미소 중력 공간에서 다양한 실험과 검증을 하는 장소로 기능한다. 이런 이유로 과거 독일항공우주센터 DLR과 에어버스가 개발하고 IBM 왓슨을 탑재한 구체 도우미 로봇인 사이먼(CIMON)이 성능을 테스트하기도 했다.
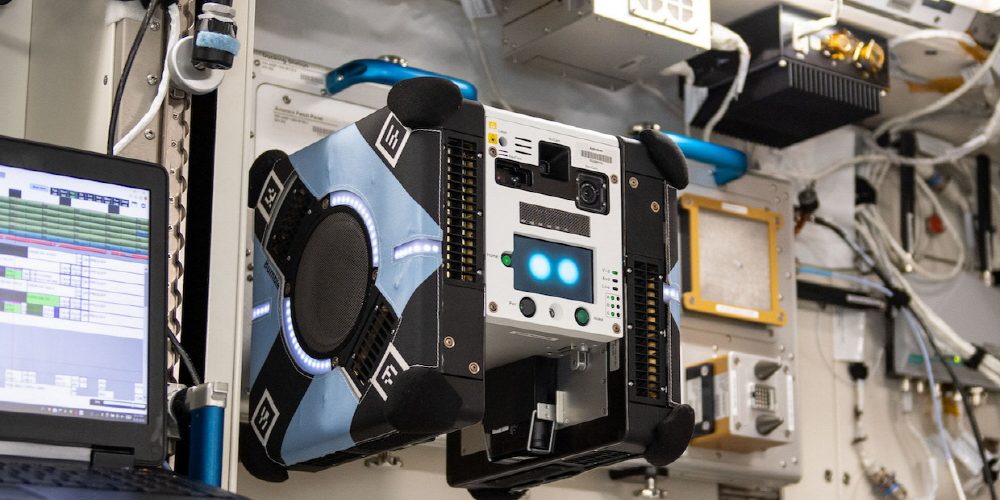
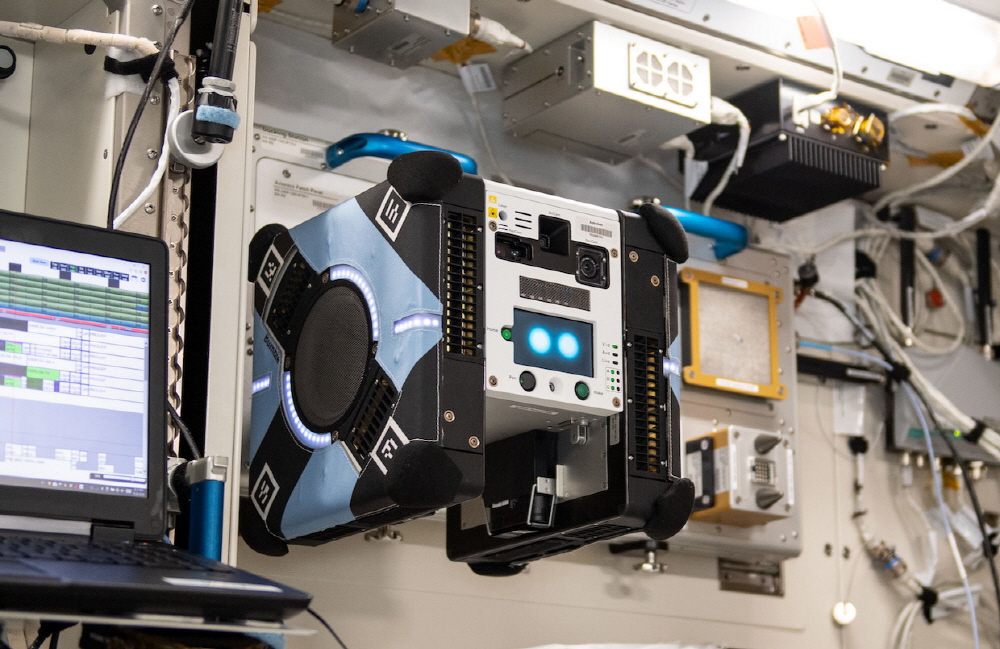
이번에는 사각형 로봇인 아스트로비(Astrobee)가 우주비행사인 크리스티나 쿡을 상대로 실험을 진행하고 있다. 이 로봇은 ISS 내부를 자율 운전하면서 이동하는 승무원을 지원하는 역할을 맡고 있다.

아스트로비는 내부 팬을 통해 공기를 밖으로 눌러 카메라로 장애물을 인식해 피하면서 이동한다. RFID 센서와 음성 지시에 따라 작은 팔을 이용해 화물을 이동시킬 수 있고 작업이 끝나면 스스로 충전스테이션으로 돌아가 다음 임무를 기다린다. 곧 허니(Honey)와 퀸비(Queen Bee)라는 로봇도 동참할 예정이다. 외형이나 색감은 다를 게 없지만 일벌 세 마리처럼 ISS 내부 유지 보수 작업을 하게 된다.
아스트로비의 초기 설정 상태에선 인간이 손으로 들고 ISS 속을 다니며 촬영한 사진을 맵으로 처리하지 않으면 ISS 내부 구조를 기억하지 못한다고 한다. 맵핑 데이터량이 너무 많거나 적어도 정확하게 지도를 만들 수 없다. 일단 이 단계는 성공한 상태이며 나머지 2기가 데이터를 공유하게 되면 곧바로 작업을 할 수 있게 될 것으로 보인다. 관련 내용은 이곳에서 확인할 수 있다.