
MIT 산하 컴퓨터과학인공지능연구소 CSAIL이 촉각 센서를 이용해 물체를 감지해 압력을 조절할 수 있는 로봇팔 2종을 개발했다. 이에 따라 유연한 소재를 이용한 새로운 로봇공학 분야인 소프트로봇이 발전할 계기가 될 것으로 기대를 모으고 있다.
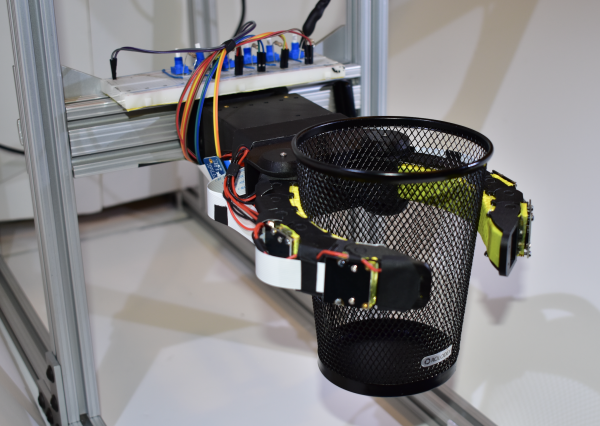
이번에 개발한 첫 번째 로봇팔은 손 저변이 신축되는 삼각 포장 형태를 취한 매직 볼 그리퍼(Magic ball gripper)다. 이 로봇팔은 물체에 풍선을 내려놓으면 풍선을 꽉 수축시켜 물체를 유지시켜준다. 로봇팔에는 힘과 변형을 감지하는 센서가 탑재되어 있으며 이 센서에서 피드백을 받아 힘을 조절해 무거운 병이나 깨지기 쉬운 감자칩까지 다양한 물건을 쥘 수 있다. 개발팀은 앞으로 이 센서를 이용해 감도가 뛰어난 감지 스킨을 개발하려 한다.
2번째 로봇팔은 카메라를 통해 암 상태를 파악해 물체 강성을 인식하는 젤플렉스(GelFlex)다. 팔에 장착한 카메라 영상을 통해 암 굴절 상태와 대상물 크기, 모양 등을 추측해 깨지기 쉬운 물건도 제대로 유지할 수 있다. 손가락이 구부러진 정도를 측정하는 센서는 상당히 정확해 오차는 평균 0.77mm 미만. 인간 손가락보다 정확하다고 한다. 80회 시험 중 물체 형상을 잘못 인식한 건 3번 뿐이다. 개발팀은 앞으로 손가락 수와 구조 등을 더 복잡하게 하고 대응 가능한 센서를 개발할 예정이다.
연구팀은 앞으로 세상을 느낄 수 있고 이를 통해 세상을 볼 수 있는 로봇을 개발하고 싶다는 뜻을 밝히고 있다. 관련 내용은 이곳에서 확인할 수 있다.




















