
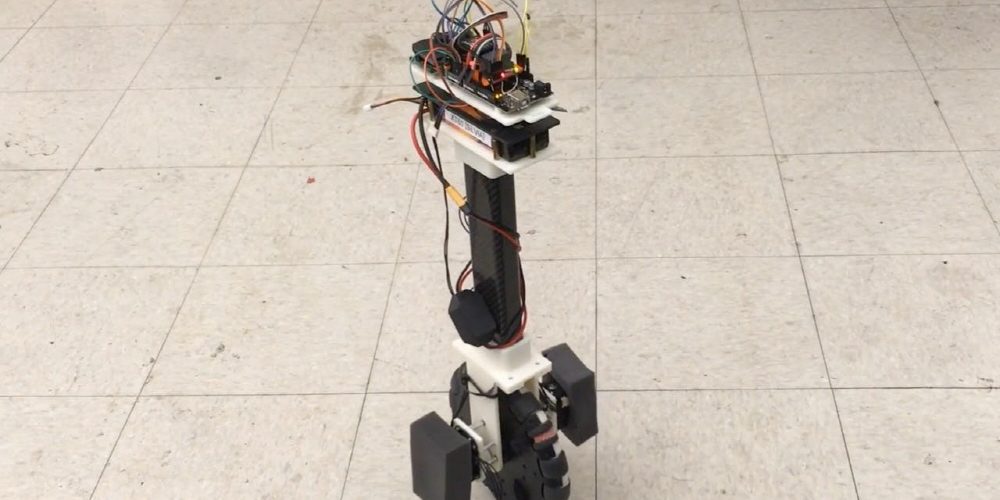
UCLA 연구팀이 큰 바퀴 하나를 이용해 이동하는 외발 바퀴로 전후좌우 이동할 수 있는 옴니휠로 절묘하게 균형을 취하면서 움직이는 이동 로봇 연구를 진행하고 있다. 옴부로(OmBURo)라는 이 로봇(정식 명칭은 Omnidirectional Balancing Unicycle Robot)은 모든 방향으로 조금씩 움직이면서 넘어지지 않게 균형을 잡는다.
옴부로는 휘청거리지만 절대로 넘어지지 않고 정해진 방향으로 이동한다. 언덕길도 문제없다. 옴브로에는 서보모터 2개가 탑재되어 있다. 하나는 세로 방향으로 도는 기본 타이어용이며 두 번째는 가로 방향으로 도는 작은 롤러다. 롤러에는 모든 동력을 제공하는데 이들 모두는 독자 개발한 유연한 나선형 기어 4개를 통해 서보모터에서 동력을 얻는다. 롤러가 움직이기 시작하면 서보모터 2개 사이 속도 차이를 감지한 경우다.
옴부로는 로봇이 사람과 함께 있는 좁은 공간에서 이용된다면 이동성에서도 모든 방향으로 이동하고 고급 조타 기능이 필요할 수 있다는 점에서 개발을 시작한 것이다. 이런 조건을 모두 갖춘 로봇이 현재까지 없는 만큼 2축 바퀴를 이용한 로봇을 고안한 것. 관련 내용은 이곳에서 확인할 수 있다.




















