

갯가재는 해저에 사는 절지동물 일종으로 큰 다리를 사용해 타격은 게 껍질이나 조개껍질을 부술 정도 위력으로 수조 유리에 금이 갈 정도라고 한다. 이런 갯가재 펀치 매커니즘을 모델링해 강력한 공격을 재현하는 로봇을 개발했다.
로봇을 개발하는 건 하버드대학 SEAS 연구팀은 갯가재를 흉내 내는 로봇은 갯가재 펀치와 개구리 다리, 카멜레온 혀 같은 일부 생물이 탄성 에너지를 축적하고 빠르게 방출해 눈으로 보기 어려울 만큼 빠른 움직임을 제공한다. 갯가재 펀치는 펀치에 특화된 다리에서 나간다. 이런 외골격이 스프링처럼 휘어지고 윗 부분 내골격으로 구부려 탄성 에너지를 축적한다. 여기에서 내골격을 분리하면 2밀리초 전에 퉁긴다.
다시 말해 활과 화살처럼 날카로운 화살을 쏘듯 내골격 브래킷을 분리해 탄성 에너지를 단숨에 날려 엄청난 펀치를 만드는 셈이다. 하지만 이 매커니즘은 어디까지나 가설이며 입증된 건 아니었다고 한다. 연구팀은 갯가재는 다른 갑각류보다 특별한 근육을 갖고 있지 않다며 근력 뿐 아니라 빠른 움직임을 만들어 내는 건 갯가재가 엄청난 가속력으로 펀치를 내보내는 뭔가 기계적 구조가 필요하다는 것이라고 밝혔다.

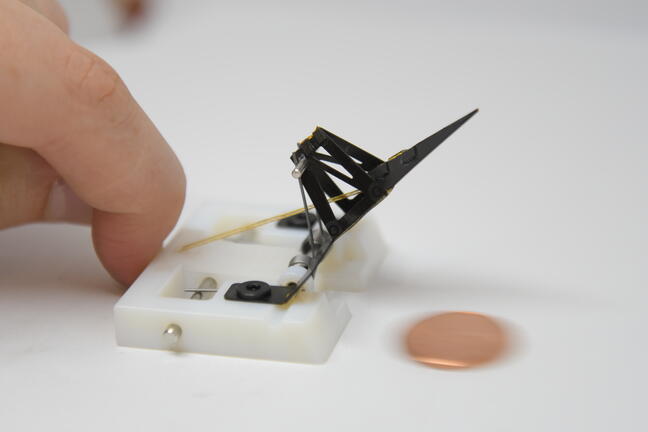
연구팀은 갯가재 펀치 매커니즘을 설명하기 위해 크기는 실제 갯가재에 가까운 무게 1.5g 로봇을 제작했다. 이 로봇은 갯가재 구조를 재현한 것으로 갯가재가 근력이 아니라 골격 구조를 잘 사용해 펀치를 내보낸다.
연구팀은 실제로 이 로봇으로 실험을 실시한 결과 로봇은 26m/sec 펀치를 만들어내는 데 성공했다. 이 로봇 펀치는 진짜 갯가재 펀치 속도에는 미치지 못하지만 연구팀에 따르면 자동차 속도가 4밀리초에 93km/h 도달하는 것과 같은 가속력이라는 것. 또 갯가재가 펀치를 만들어내는 매커니즘에는 4단계가 있는 것도 연구를 통해 밝혀졌다.
연구팀은 이 연구는 물리적 모델을 구축하고 수학적 모델을 개발하는 과정에서 갯가재 펀치 구조를 다시 이해해 생물이 여러 번 초고속 동작을 수행할 수 있는 큰 에너지를 제어하는 매커니즘을 발견할 수 있었다고 밝혔다. 또 연구팀은 갯가재 펀치 뿐 아니라 빠른 개구 이동, 카멜레온 긴 혀를 늘리는 움직임, 개미가 턱을 올리는 구조 등도 로봇으로 재현하는 방식으로 모방하고 연구할 수 있다고 밝히고 있다. 관련 내용은 이곳에서 확인할 수 있다.




















