

오픈 다이내믹 로봇 이니셔티브(Open Dynamic Robot Initiative)는 저비용으로 4족 보행 로봇 구축을 목표로 하는 오픈소스 프로젝트다. 이 프로젝트는 막스플랑크연구소 내 연구 그룹(Movement Generation and Control Group), 뉴욕대학 공학부, 프랑스 국립과학연구센터(Laboratory for Analysis and Architecture of Systems) 등 여러 로봇 연구 기관이 주도하는 공동 오픈소스 프로젝트다. 처음부터 다양한 로봇 구축에 이용할 수 있는 저비용 액추에이터 개발로 시작해 궁극적으론 로봇 연구 커뮤니티가 요구하는 저비용 경량 로봇 개발을 목표로 하고 있다.

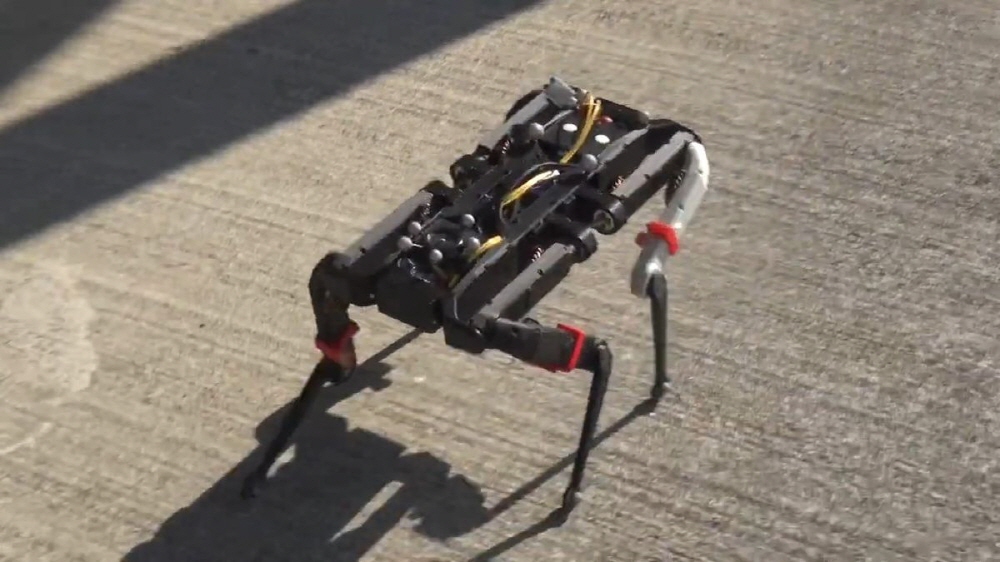
개발 중인 4족 보행 로봇은 네 발로 충격을 흡수할 수 있고 내구성 테스트나 격렬한 동작을 실시하는 강화학습은 고비용 로봇을 이용하려면 위험하지만 저비용으로 구축하는 4족 보행 로봇이라면 비교적 용이하게 실험할 수 있다. 몸통을 수평으로 유지하는 고급 자세 제어 소프트웨어도 개발했고 수직 점프도 65cm까지 가능하다고 한다. 단차를 향해 점프하거나 다양한 속도로 걷는 것도 가능하다. 최신 버전에는 배터리와 무선 통신 장치도 탑재해 와이파이로 원격 조작할 수도 있다. 통신 가능 거리는 30m 정도라고 한다.
오픈다이내믹로봇이니셔티브가 개발하는 모든 하드웨어 도면과 소프트웨어는 오픈소스화되어 있어 깃허브에서 확인할 수 있다. 주요 부품도 3D프린터로 제조 가능하기 때문에 다른 연구소도 손쉽게 4족 보행 로봇을 만들 수 있다고 한다. 관련 내용은 이곳에서 확인할 수 있다.

