영화나 게임, 판타지 소설에는 인간 시체를 조종하는 네크로맨서가 등장한다. 그런데 미국 라이스대학 연구팀이 거미 시체를 로봇화해 조작하는 로봇 기술을 개발했다. 살아있는 거미와 마찬가지로 섬세하게 물체를 잡을 수 있는 이 기술에는 야생 곤충 포획이나 마이크로 디바이스 부품 조립 용도를 기대할 수 있다.
연구팀이 이 기술을 개발한 계기는 바닥에 떨어진 다리가 둥글게 감긴 거미 시체를 발견하면서다. 연구팀에 따르면 인간 팔은 관절을 구부리는 근육과 늘리는 근육 작용에 의해 굽힘과 늘림을 할 수 있다. 반면 거미는 굴근이라는 근육으로 다리를 구부리고 체액 압력으로 다리를 늘린다. 죽은 거미 다리가 둥글게 되는 건 압력이 빠져 다리가 줄어드는 힘만 남은 게 이유다.
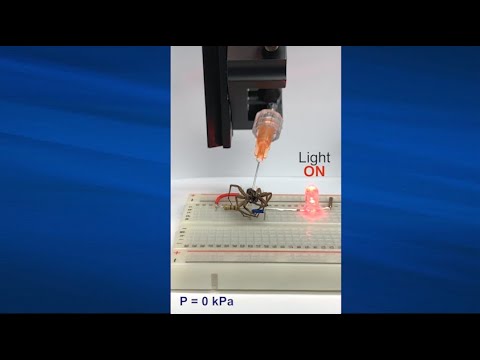
바로 이 메커니즘을 엔지니어링에 도입하기 위해 거미를 냉동시켜 안락사시킨 다음 두흉부 그러니까 다리 8개가 연결되어 있는 몸통 부분에 주사 바늘을 찌르고 접착제로 고정했다. 이 상태에서 주사바늘로 공기를 흘리면 압력에 의해 다리가 열리고 공기를 빼면 다리가 닫힌다.
이 작업을 통해 이 로봇은 크레인 게임 내 크레인처럼 물건을 잡을 수 있다. 살아있는 거미는 다리에 붙은 밸브를 이용해 다리 8개를 따로따로 움직이지만 거미가 죽으면 밸브 기능도 사라져 공기압만으로 다리 8개를 모두 조작할 수 있다.
이 로봇이 다리를 개폐할 수 있는 횟수는 1,000회 정도다. 그 이상이 되면 마찰이 발생하기 시작하지만 이는 관절 부분 건조가 주요 원인이어서 로봇을 폴리머 코팅하면 극복할 수 있을 것으로 보고 있다. 연구팀은 작은 규모로 물체를 선별하거나 이동시키는 반복 작업이나 마이크로일렉트로닉스 조립까지 다양한 용도에 활용을 검토할 수 있다고 밝히고 있다. 관련 내용은 이곳에서 확인할 수 있다.