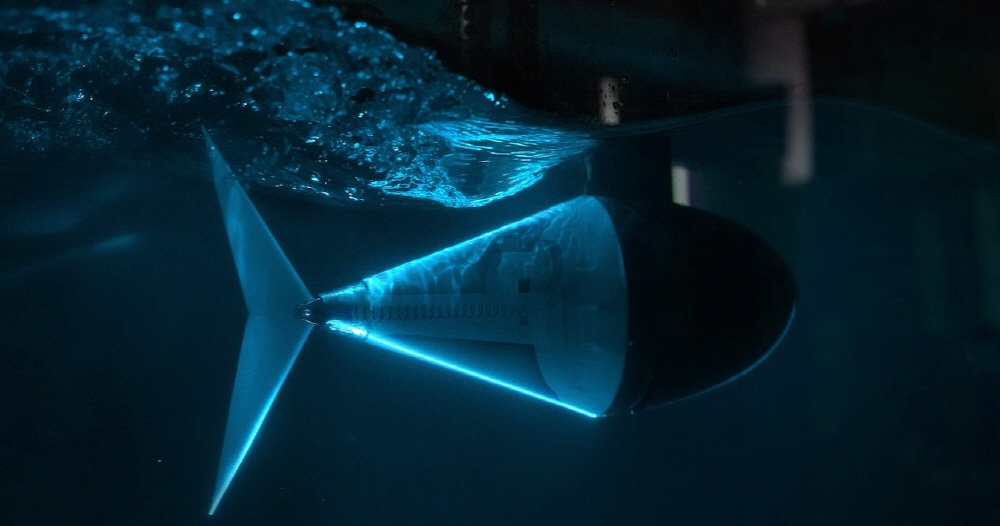
버지니아대학 연구팀이 실제와 같은 속도로 꼬리를 움직일 수 있는 속도로 꼬리를 움직일 수 있는 참치 로봇을 개발헀다. 수영 속도는 최고 2.4km/h로 사람이 걷는 평균 속도 절반 가량이다.
이 로봇은 수중을 빨리 헤엄치기 위해서가 아니라 물고기가 헤엄칠 때 어떻게 속도를 올리거나 내릴 것인지 조사하기 위해 만든 것. 참치는 전신을 관통하는 힘줄이 있고 이 힘줄에 힘을 가해 꼬리를 단단하고 빠르게 수영할 수 있다.
버지니아대학 연구팀은 근육과 힘줄 시스템을 역학과 유체역학을 결합해 재현하려고 했다. 특별히 설계한 꼬리를 가진 로봇이 실제처럼 물속에서 속도를 올리거나 내릴 능력을 갖기 위한 구조를 도출했다고 밝히고 있다.
연구팀은 이 구조를 실제로 시도하는 참치 로봇을 만들고 꼬리 경도를 일정하게 유지한 상태에 수영과 진짜 참치처럼 꼬리 경도를 변화시켜 수영을 비교했다. 그 결과 경도를 살 경우 일정 경우보다 거의 절반 에너지 소비로 더 자유롭게 속도를 조종할 수 있는 것으로 나타났다고 한다.

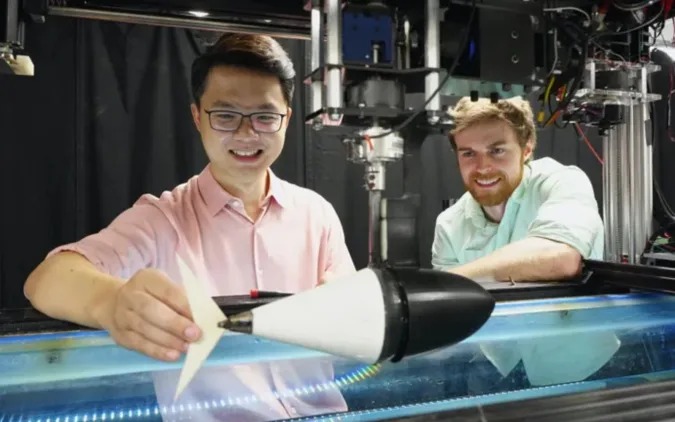
연구팀은 꼬리 경도를 자전거 기어에 비유해 설명하고 여러 단계 기어를 변속해 더 빠르고 적은 에너지로 더 멀리 갈 수 있다는 것이다. 연구팀이 만든 건 참치 크기라기보다는 고등어 정도 크기 로봇으로 실험에 성공한 만큼 이후 더 크거나 작은 참치 로봇을 만들고 추가 검증을 진행한다. 또 사행 지느러미에 의한 추진 방법도 개발하고 있으며 미래 수중 무인 항공기에 해당 기술을 이용해 더 에너지를 절약하고 빠르고 자유롭게 움직일 수 있게 하려 한다.
수중을 헤엄치는 로봇 개발은 최근 시작된 게 아니라 예를 들어 카네기멜론대학은 뱀 로봇에 나사를 달아 수중을 헤엄칠 수 있게 하고 있다. 하버드대학 연구팀은 되면 그대로 헤엄치는 곤충형 로봇을 개발하고 공중으로 돌아갈 수 있도록 개선하기도 했다. 관련 내용은 이곳에서 확인할 수 있다.