

구글 모기업인 알파벳 산하 자율주행 자동차 개발 기업인 웨이모(Waymo)는 자율주행 시스템 향상을 위해 시뮬레이션시티(SimulationCity)라고 명명한 가상공간에서 시뮬레이션에 주력하고 있다. 이런 시뮬레이션시티를 활용한 웨이모의 노력에는 어떤 게 있을까.
일론 머스크가 이끄는 테슬라는 세계를 달리는 테슬라 차량에서 수집한 데이터로 자율주행 기능을 진화시키고 있다. 하지만 반대로 웨이모가 소유한 실제 차량은 불과 600대 정도 밖에 없다. 웨이모가 자율주행 차량을 주행하는 건 미국 애리조나와 캘리포니아 일부이며 그 밖에 LA에서 맵핑 데이터를 수집하는 수동 운전 차량이 일부 있다.
웨이모는 테슬라와 달리 자율주행 기능 개발에 실제 데이터를 사용하는 게 아니라 자율주행 차량을 가상 공간 시뮬레이션 테스트하는 방식을 채택하고 있다. 웨이모는 2017년부터 카크래프트(CarCraft)라는 시뮬레이션 소프트웨어를 이용해 적어도 80억km 이상 거리를 가상공간에서 주행해왔다고 한다. 그런데 웨이모 수석 프로덕트 매니저인 벤 프랭키에 따르면 카크래프트는 새로운 차량과 옵션을 시뮬레이션하는 능력에 문제가 있었다는 것.

그래서 웨이모는 새로운 시뮬레이션 소프트웨어인 시뮬레이션시티를 개발하고 도로 모든 문제를 해결할 수 있도록 웨이모 드라이버(Waymo Driver)를 테스트하고 있다. 시뮬레이션시티는 가상공간에서 웨이모 드라이버를 탑재한 완전 자율주행 차량을 몰고 샌프란시스코 거리를 가로지르는 20분 드라이브와 애리조나주 피닉스에서 텍사스주 댈러스까지 11시간 드라이브 등 시뮬레이션으로 평가 가능하다고 한다.
전기 자동차를 전개하고 실제 차량에서 데이터를 대량으로 수집하는 테슬라와 달리 실제 서비스 전개가 한정되어 있는 웨이모에게 시뮬레이션은 자율주행 차량 개발에 중요한 요소다. 웨이모 엔지니어는 시뮬레이션시티를 통해 일반 운전 시나리오와 안전에 관한 위험한 시나리오를 대규모로 테스트하고 여기에서 학습한 내용을 실제 차량에 적용할 수 있다.
시뮬레이션 소프트웨어는 현실 세계 제약에 얽매이지 않고 도로를 달린 차량이 수집한 것과는 비교도 안 될 만큼 많은 데이터를 수집할 수 있다. 2020년 시점 웨이모 드라이버를 이용한 차량이 도로를 달린 거리는 2,000만 마일 정도였지만 가상공간에선 이미 150억 마일 거리를 달렸다. 시뮬레이션시티는 웨이모 드라이버 탑재 차량이 현실 세계에서 수집한 2,000만 마일 이상 주행 데이터와 타사 기업 운전 행동 데이터, 고급 시뮬레이션 기술과 기계학습을 이용해 구축해 웨이모는 가상공간에서 재현되는 상황 유효성과 신뢰성에 자신감을 갖고 있다.

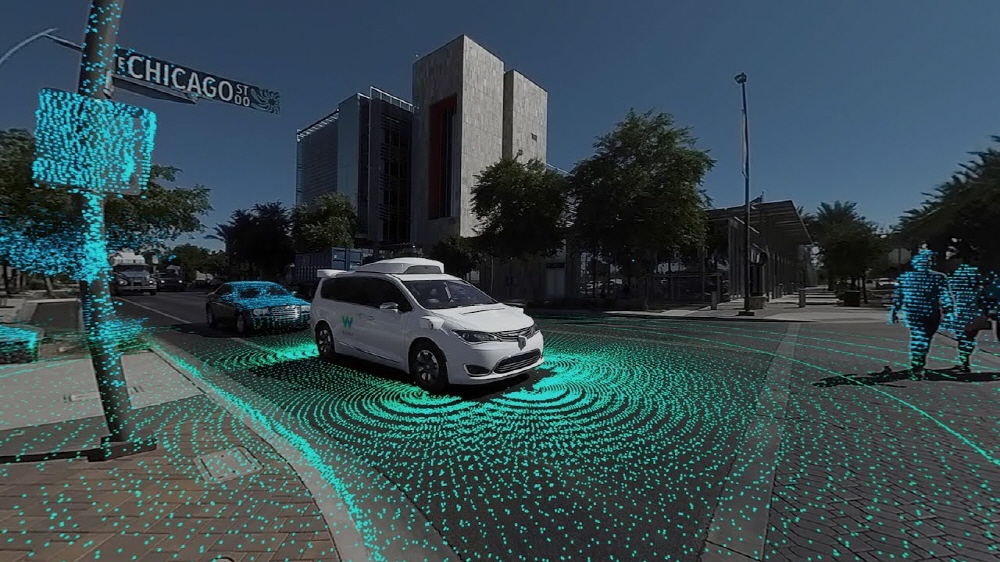
시뮬레이션시티는 기존 카크래프트보다 자세한 가상 상황을 재현할 수 있으며 웨이모 엔지니어는 차량과 도로에 쏟아지는 작은 빗방울이나 저녁이 되어 주위를 비추는 눈부신 불빛 같은 복잡한 요소까지 시뮬레이션할 수 있다고 한다. 이런 상황은 자율주행 차량 센서를 혼란시키는 것으로 알려져 있으며 신호등 읽기 등에서 문제를 일으킬 수 있다.
웨이모는 또 가상공간 영상을 현실감 있게 하기 위해 자율주행 차량에 의해 수집한 실제 데이터와 인공지능을 결합한 SurfelGAN(surface element GAN), 그러니까 표면 요소 적대적 생성네트워크 기술로 가상공간 영상을 생성한다.

이런 가상공간을 이용한 자율주행 기술 개발에 대해 미시간대학 기계공학 교수인 후이펑(Huei Peng)은 결함이 있는 데이터를 이용하면 시뮬레이션 결과도 쓸모없는 게 되어 버린다며 위험을 지적한다. 이에 대해 웨이모 측은 시뮬레이션시티 성숙도가 꾸준히 높아지고 있다고 주장한다.
웨이모는 완전 무인 택시인 웨이모 원(Waymo One) 전개를 주의해야 하며 복잡한 도시 환경에 대응할 수 있는 게 확인될 때까지 샌프란시스코 등 서비스 개시를 앞두고 있다. 웨이모는 시뮬레이션시티가 웨이모 드라이버 성숙도 향상에 기여하고 앞으로 서비스 대규모 전개에 대비할 수 있도록 할 방침이다. 관련 내용은 이곳에서 확인할 수 있다.