

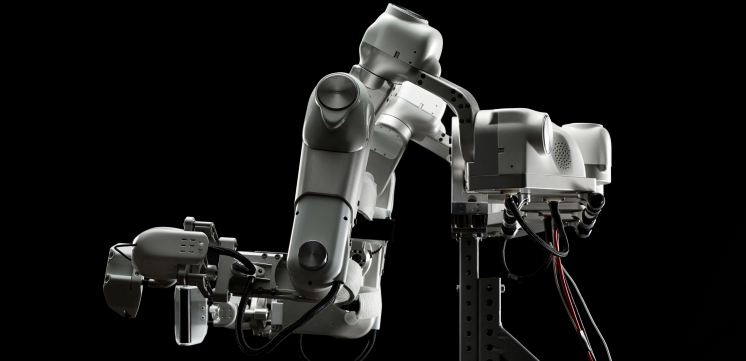
하모니 외골격(Harmony Exoskeleton)은 텍사스대학 산하 리뉴로보틱스랩(ReNeu Robotics Lab)이 개발한 것으로 신체 일부 마비나 척수 관련 사고를 당한 상반신 장애인을 위해 팔을 움직이는 동작을 통해 움직이지 않는 팔의 감각을 다시 되찾게 해주는 재활 목적으로 만든 것이다.
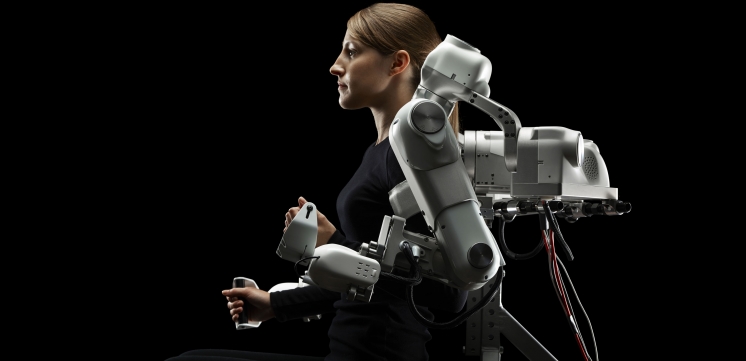

이 외골격은 신경학적 장애를 입은 사람의 움직이지 않는 팔과 어깨가 움직일 수 있게 기계의 힘을 빌려 부드럽게 사람을 눌러준다. 초당 2,000회에 달하는 데이터를 기록하면서 알고리즘을 통해 모션 센서가 사람이 움직이는 방향을 감지하기 때문에 재활 과정과 조금이라도 다른 움직임을 보이면 로봇이 알아서 올바른 위치로 보정해준다.
지금은 상반신용만 있지만 언젠가는 사지와 손가락 등을 대상으로 한 재활 로봇이 등장할 수 있다. 관련 내용은 이곳에서 확인할 수 있다.
