


자율주행은 인간이 운전 조작을 하지 않아도 자동차가 자동으로 주행하는 것으로 이미 실용화되는 중이다. 자동차 제조사마다 행동 안전성을 높이기 위해 새로운 실증 시험을 실시하고 있는 단계인 것. 이런 자율주행 기술에 기계학습이 어떻게 기여하고 있을까. 자율주행 기술을 개발 중인 보이지(Voyage) 공동 설립자이자 CEO인 올리버 카메론이 설명해 눈길을 끈다.
이에 따르면 지난 10년간 자율주행 기술 중에서도 객체검출 기술이 주로 논의되어 왔다. 객체검출 기술은 횡단보도와 차도 옆을 걷는 사람 등을 감지하는 기술로 이 기술 정밀도를 높이면 자동차 눈앞에 튀어 나온 사람 등 탐지율이 높아진다.

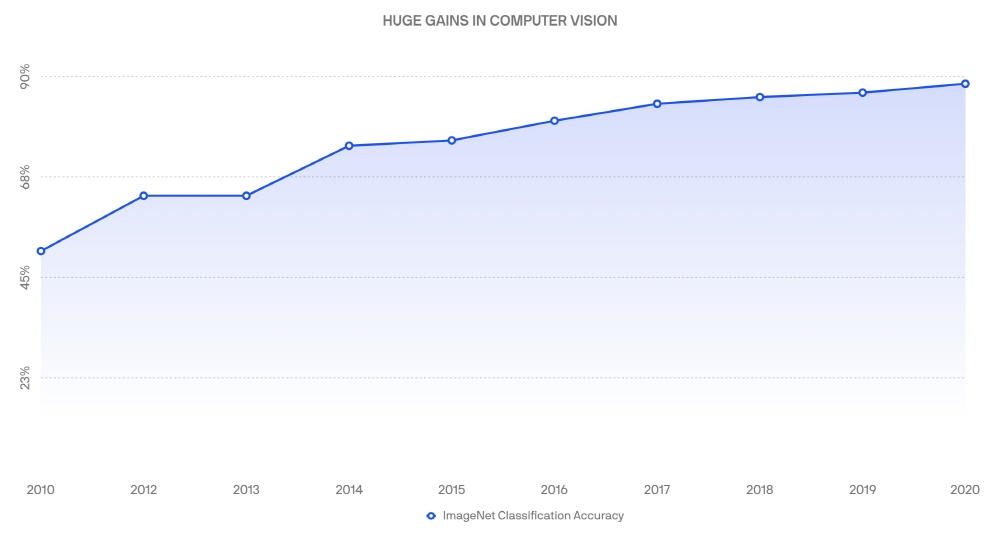
거대한 이미지 데이터 세트인 이미지넷(ImageNet)을 이용한 객체 감지 능력 측정 시험을 보면 기계학습이 일반화되기 이전인 2010년경 당시 최첨단 기술로도 50% 정도 밖에 달성하지 못했다. 하지만 2020년 현재 정확도는 88%까지 이르고 있다. 지속적인 발전을 이루고 있는 것이다
자율주행 기술이 아직 여명기이던 2012년 알렉스 크리제브스키(Alex Krizhevsky)와 일리야 수츠케버(Ilya Sutskever), 제프리 힌튼(Geoffrey Hinton)의 연구팀은 알렉스넷(AlexNet)이라는 딥러닝 기술을 객체 검출에 적용하는 연구를 발표했다.
알렉스넷은 당시 최고 정확도로 자율주행 업계에 큰 영향을 줬다. 그 결과 2014년경에는 수많은 자율주행 기술이 딥러닝을 활용하게 됐다. 이런 경향은 2020년까지 이어지고 있다. 이 같은 발전 결과 자율주행 기술은 주위 중요한 물체를 안전하게 감지할 수 있게 됐다. 물론 올리버 카메론은 이젠 그 주위 물체가 뭘 할 것인지를 예측하는 일이 남아 있다고 말한다. 제대로 예상을 하면 주위 인간이나 물체 이동을 예측하고 적절하게 행동할 수 있지만 잘못된 예측을 하면 사고를 일으켜 버린다. 적절한 예측은 불가능하게 들릴 수도 있지만 인간은 이미 주위 상황에서 수천 명 정보를 취득하고 직관적으로 예측을 하고 있다.


현재 자율주행 기술 예측 문제 예로는 도로에서 우회전을 하는 상황을 들 수 있다. 우회전을 할 때에는 대항차선 차량과 횡단보도 보행자 등 움직임을 예측하고 우회전을 수행해야 한다. 따라서 우회전 상황은 자율주행 중에도 어려운 문제다. 그는 현재 자율주행 기술이 우회전을 할 때 과정을 이렇게 설명한다. 먼저 센서 등 인식 모듈에서 특정 거리 물체를 감지하고 그 정보를 예측 모듈에 입력한다. 둘째 예측 모듈은 현재와 이전 관측 결과에서 각 개체가 현재에서 5초 뒤까지 어떻게 이동할지 예측을 생성한다. 다음으로 개별 이동 쳬측을 모든 알고리즘에 대입해 실행 가능한 가장 안전한 행동을 산정한다. 마지막으로 가장 안전한 행동을 실행에 옮기고 100밀리세컨드마다 결정을 재평가한다.
그는 이런 과정으로 실행되는 자율주행은 위험한 결과를 가져올 것이라고 주장한다. 특히 붐비는 시내에선 최악의 상황을 낳을 수 있다고 지적한다. 최근에는 기계학습 기술을 예측에도 적용하려는 움직임을 보이고 있는데 카메론은 알렉스넷이 기계학습 객체 검출에 적용됐던 것과 비슷하게 기계학습을 예측 적용해 예측 정확도가 개선될 가능성이 있다고 밝혔다.
자율주행 기술 예측은 필수가 아니라면서도 기계학습 기술을 예측까지 적용해 자율주행 차량의 의사 결정 능력이 극적으로 개선되고 승객은 안전하게 이동할 수 있게 될 것이라는 설명이다. 물론 그의 기업인 보이지 역시 실시 중인 자율주행 기술 예측에 관한 연구를 발표할 예정이라고 한다. 관련 내용은 이곳에서 확인할 수 있다.