

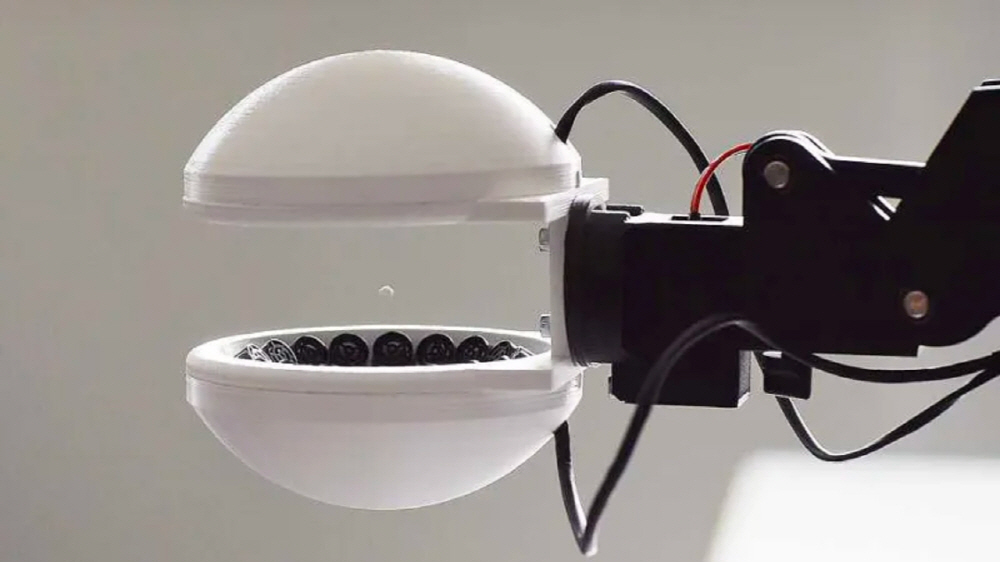
스위스취리히연방공과대학 연구팀이 음향 부양이라는 현상을 응용해 직접 만지지 않고 잡는(?) 로봇팔을 개발했다. 만지지 않고 들어 올려 조작할 수 있도록 해 작고 연약한 물건이라도 집을 수 있다는 것.
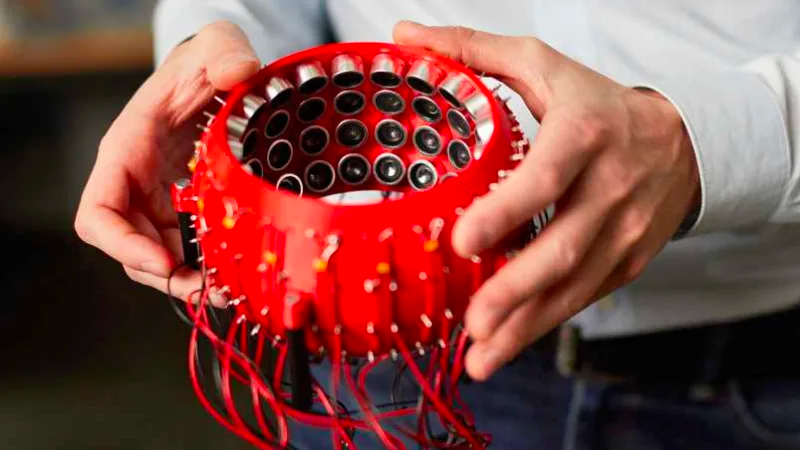
공연장 같은 곳에서 큰 스피커는 큰 울림을 준다. 이게 바로 소리의 힘으로 띄우는 음향 부양의 기본 원리. 이 로봇팔은 작은 변환기에서 인간의 귀로는 감지할 수 없는 초음파를 생성하고 여러 음이 교차하는 지점에 압력 포인트가 생성되게 초점을 맞춘다. 이런 압력 포인트를 볼 수는 없지만 작은 물체를 공중에 떠있는 것처럼 보이게 할 수 있다.


가장 섬세한 작업을 하는 로봇팔이라도 반도체 제조에 이용하는 작은 부품이나 복잡한 아날로그 시계 제조에 쓰이는 부품이라면 잡기 어렵다. 또 실제 제품이 제대로 작동하려면 구성 요소를 청결하게 유지하는 것도 필수다.
이 제품을 개발한 연구팀은 비용적으로 매력이 있다고 설명한다. 공장용으로 설계한 로봇은 특정 부품을 처리하도록 특별하게 설계한다. 정해진 것 외에 다른 부품을 새로 지원하려면 설계나 프로그램을 수정해야 한다. 음향 부양을 이용한 기술은 여러 개체를 처리하는 로봇 개발을 위한 열쇠가 될지 모른다. 하드웨어는 동일하게 유지하고 소프트웨어는 생성된 초음파 강도와 주파수를 조정해 실제로 울리는 압력 포인트 크기와 위치를 바꿀 수 있다.

지금은 상당히 작고 가벼운 개체 밖에 지원하지 않지만 지능형 영상 시스템과 함께 사용하면 로봇은 뭔가 다른 걸 잡아 작업을 수행하기 위해 다시 프로그래밍을 할 필요가 없다. 공장에선 로봇 개선과 재구축에 필요한 비용을 줄일 수 있다는 얘기다.
다만 이 방법은 실용화되려면 시간이 필요할 수 있다. 음향 부양 기술은 1970년대부터 알려진 현상으로 지금까지 수많은 연구가 진행되어 왔지만 엄청나게 작은 물체만 가능해 실용화도 좀처럼 쉽지 않았던 게 사실이다. 다만 전자부품 소형화가 진행되는 지금 음향 부양 로봇 활로가 생길지도 모른다. 관련 내용은 이곳에서 확인할 수 있다.
