

중국 칭화대 연구자가 2023년 8월 설립한 로봇 개발 기업 로봇에라(Robot Era)가 스니커즈를 신은 인간형 로봇 STAR1이 고비 사막을 달리는 영상을 공개했다. STAR1 최고 속도는 12.9km/h로 스니커즈를 신은 상태에서 지난 3월 유니트리(Unitree) 인간형 로봇인 유니트리H1이 기록한 11.9km/h를 능가했다.
로봇에라가 개발한 STAR1은 키 171cm, 무게 65kg으로 사람과 거의 비슷한 크기와 무게를 가진 이족 보행 로봇이다.
로봇에라가 지난 9월 촬영한 데모 영상에서는 STAR1이 고비 사막 모래밭, 초원, 포장 도로를 달리는 모습을 볼 수 있다. STAR1은 사람과 유사한 스니커즈를 신고 모래 언덕을 가뿐하게 달리는 모습도 담겨 있다.
유니트리 H1은 달릴 때 두 발이 완전히 지면에서 떨어지는 순간이 없었기 때문에 엄밀히 말해 달리기라고 할 수 없었지만 STAR1은 두 발이 완전히 지면에서 떨어지는 순간을 보여준다.
STAR1은 맨발 상태에서도 고비 사막을 달렸으며 달리는 자세는 독특하게 등을 곧게 편 상태로 두 다리를 앞으로 내딛는 방식이다.
STAR1에는 정밀한 유성 감속기, 고정밀 엔코더, 드라이버 등을 포함한 400Nm 토크를 가진 관절 모터와 고속 통신 모듈 등이 장착되어 있다.
로봇에라는 로봇 사지와 동적 중심을 제어하는 건 울퉁불퉁한 지형에서 자율적으로 이동할 수 있도록 하는 데 필수적이라며 예를 들어 단샤 지형과 같은 부드러운 지면이나 울퉁불퉁한 지형을 이동하려면 충격을 흡수하고 지면 기복에 적응할 수 있는 유연하고 적응력 있는 관절이 필요하다고 밝혔다. 반면 단단한 지면에서는 안정성을 위해 관절을 견고하게 제어할 필요가 있으며 로봇은 매끄러운 움직임과 넘어짐 방지를 위해 관절 강도와 유연성을 조절해야 한다고 설명했다.
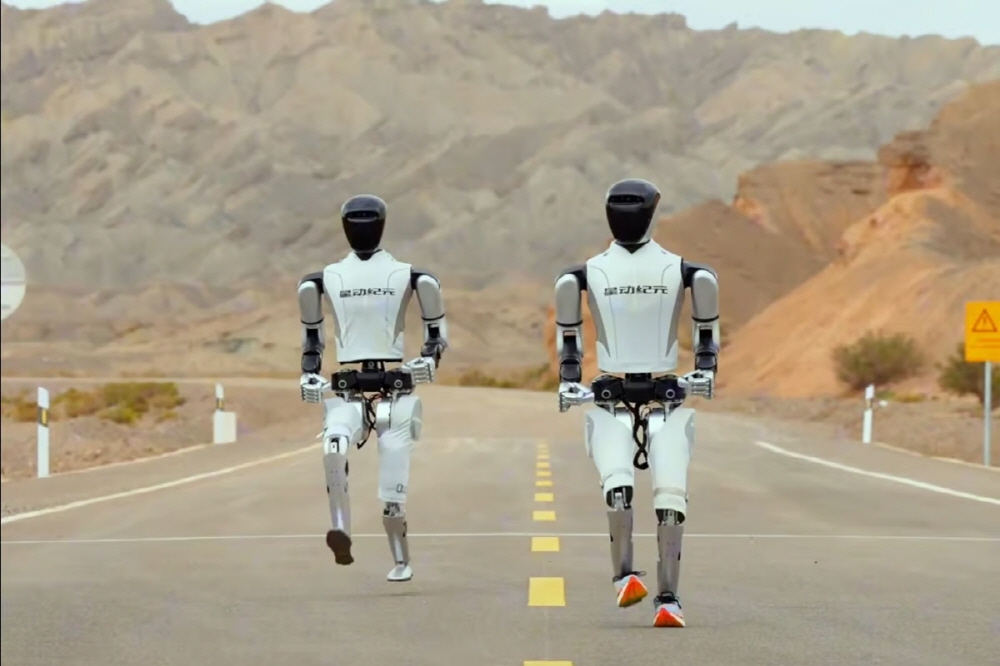
로봇에라는 데모 영상에서 STAR1 2대를 준비해 각각 맨발 상태와 스니커즈를 신은 상태로 고비 사막을 달리게 했다. 스니커즈를 신은 STAR1은 맨발 STAR1보다 더 빠르게 달렸으며 최고 시속 8마일 속도로 34분 동안 달릴 수 있었다.
STAR1에는 최대 275TOPS 처리 능력을 가진 AI 컴퓨팅이 탑재되어 있으며 이는 AI용 윈도 노트북인 코파일럿+ PC보다도 뛰어난 성능을 자랑한다.
STAR1은 AI와 대규모 언어 모델을 통합해 엔드투엔드 신경망으로 훈련됐기 때문에 새로운 기술을 빠르게 학습하고 다양한 작업에 적응할 수 있다. 로봇에라는 이런 범용성 덕분에 STAR1은 도로, 초지, 사막, 울퉁불퉁한 표면 등 다양한 지형에 직면하더라도 달리기, 걷기, 점프라는 3가지 보행 모드를 자유롭게 전환할 수 있다고 밝혔다. 관련 내용은 이곳에서 확인할 수 있다.

