

싱가포르 난양이공대 연구진이 컴퓨터 비전에 필수적인 자율주행 기능에서 도로 표지판 내용을 잘못 인식하게 하는 고스트스트라이프(GhostStripe) 공격을 개발했다. 해당 논문(Invisible Optical Adversarial Stripes on Traffic Sign against Autonomous Vehicles)은 6월 ACM 국제회의에서 발표 예정이다.
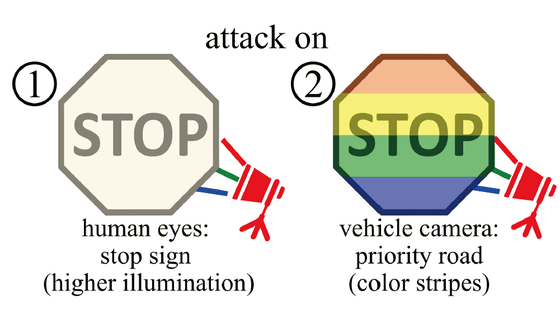
예를 들어 STOP이라고 쓰인 일시정지 표지판이 있다고 가정해보자. 고스트스트라이프 공격은 이 표지판을 향해 깜박이는 발광다이오드를 비추는 방식이다. 깜박임 주기를 조정하면 인간 눈에는 STOP으로 보이지만 컴퓨터 비전에서는 줄무늬 패턴 때문에 STOP을 읽지 못하게 된다.
컴퓨터 비전에 표지판을 잘못 인식시키는 공격은 이전에도 입증된 바 있다. 하지만 최근 카메라 CMOS 이미지 센서는 전체를 한 번에 촬영하는 대신 시간차를 두고 순차적으로 촬영한 뒤 최종 정지 영상을 생성하는 롤링셔터(rolling shutter) 방식을 많이 사용한다. 고속 이동 물체가 왜곡되어 보이는 것도 이 때문이다.
표지판에 발광다이오드를 비췄을 때 롤링셔터 현상으로 줄무늬 위치가 이동하면서 컴퓨터 비전에서 안정적인 인식이 어려워진다. 때로는 표지판이 무시되기도 하고 또 다음에는 정지 표지판으로 잘못 인식된다.
연구팀은 카메라-표지판 위치 관계와 표지판 크기 변화를 실시간 추정해 깜박임을 제어해 안정적으로 표지판을 잘못 인식하게 하는 방법을 개발했다. 실제 환경과 비슷한 테스트에서 최대 94% 프레임에서 표지판을 잘못 인식시키는 데 성공했다고 한다. 또 차량 내부에 트랜스듀서를 설치해 타이밍 제어를 개선한 고스트스트라이프2 공격으로 잘못 인식 성공률을 97%까지 높였다.
다만 표지판을 향한 공격용 빛이 너무 강하면 공격 정확도가 떨어질 수 있다고 한다. 롤링셔터 방식 대신 전체를 한 번에 촬영하는 글로벌셔터 방식 카메라나 스캔 순서를 랜덤화하면 이 공격을 방어할 수 있다.
연구팀은 이런 공격으로 피해 차량이 중대 사고에 휘말릴 수 있다고 지적하며 카메라 센서, 인식 모델, 자율주행 시스템 각 레벨에서 대책을 논의해야 한다고 밝혔다. 관련 내용은 이곳에서 확인할 수 있다.




