자동차를 운전하고 있으면 갑자기 진로상 차나 인간이 튀어나오고 갑자기 브레이크를 밟아야 하는 적이 많을 것이다. 알파벳 산하 자율주행차 개발 기업인 웨이모가 적신호를 무시하고 달리는 인간이나 갑자기 차선 변경을 시도하는 차 등 잠재적 위험에 대한 충돌 회피 능력을 평가하기 위한 테스트 방법인 CAT(Colision Avoidance Testing)가 있다.


완전 자동 운전을 하는 완전자율형 시스템은 운전석에 인간이 없는 상태에서도 운전 작업 모든 걸 처리할 필요가 있기 때문에 일반 운전지원시스템보다 훨씬 세세한 테스트가 이뤄진다. 웨이모에선 가상 운전, 테스트 주행, 실주행을 조합한 시나리오 기반 테스트 방법을 이용하고 있다고 한다.
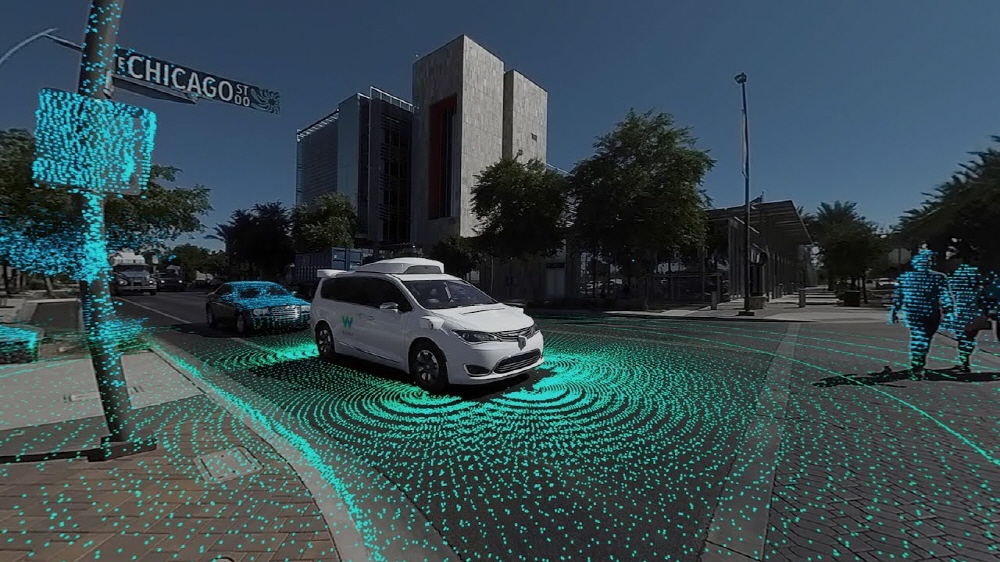
웨이모는 기존 경험에서 얻은 기존 운전 데이터와 경찰 사고 데이터베이스, 드라이브 리코더에 기록된 충돌 사고 데이터, 웨이모 자동 운전 차량이 주행하는 지역과 도로 상태 등 다양한 데이터를 시뮬레이션에 투입한다. 이로 인해 테스트에선 차도에서 차가 튀어 나오거나 보행자가 신호를 무시하고 횡단하는 등 거의 어디서나 발생할 수 있는 일반적인 상황이 재현되어 자율주행차는 여러 차례 다양한 상황을 근거로 이 테스트를 받으면서 피드백을 해나가는 것이다.


웨이모는 사각에서 튀어나오는 보행자와 자전거에 대응하기 때문에 인간 위치와 속도를 바꾸면서 충돌을 피하기 위해 긴급 회피 조작이 필요한 테스트 시나리오를 여러 개 만들었다. 웨이모에 따르면 웨이모 자율주행 시스템은 인간에 의한 수동 운전 결과보다 높은 충돌 회피 능력을 보였다고 한다. 2022년 9월 실시된 테스트에서도 항상 주의를 게을리 하지 않고 피로도 느끼지 않는 건강하고 상시 문제에 주시하는 NIEON(non-impaired, with eyes always on the conflict)이라는 가상 인간 운전자 운전이라면 충돌 완전 회피율이 62.5%인데 비해 웨이모 자동 운전 시스템은 75%를 기록했다고 한다.
웨이모는 자사 자율주행을 더 많은 곳에서 더 많은 사람에게 게속 제공하기 때문에 이런 CAT는 안전성 평가 과정에서 중요하다며 차와 운전자가 안전에 대한 이니셔티브를 더 잘 이해할 수 있도록 테스트와 안전 평가 방법에 대한 자세한 정보를 계속 공유할 것이라고 밝히고 있다. 관련 내용은 이곳에서 확인할 수 있다.