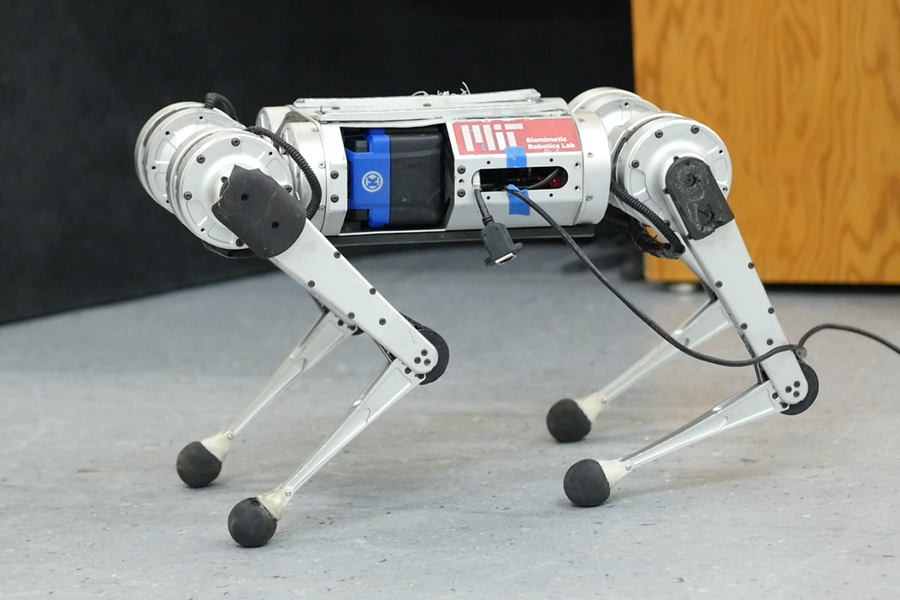
치타형 로봇 기술을 높이기 위해 시행착오 중인 MIT CSAIL 로보틱스 연구팀이 어떤 지형이라도 빨리 달릴 수 있고 또 필요에 따라 달리는 방법을 바꿀 수 있도록 조정한 결과 지금까지 이상으로 빠른 속도로 달릴 수 있게 됐다고 밝혔다.
현실 세계는 요철이나 자갈길, 미끄러운 얼음, 갑작스러운 장애물 등 보행형 로봇에 있어선 혼돈 그 자체다. 2족이나 4족 보행 로봇이 천천히 신중하게 전진하는 건 최악의 사태를 시야에 넣고 프로그래밍해 설계하기 때문이다. 이런 로봇이 어떤 길에서도 자신 있게 걸음을 내딛으려면 적응 능력이 관건이다. 안전한 길에서 주의가 필요한 길로 갈 때 발걸음이나 속도 모두 변화시켜야 한다. 물론 새로운 지형을 걸을 때마다 하나씩 학습시킬 수도 있지만 이렇게 하면 필연적으로 시간이 걸린다.
새로운 접근법으로 직접 트라이&에러로 새로운 길에 도전하고 움직임을 자가 수정할 수 있는 로봇이 개발됐다. 하지만 실제로는 인간이 발을 내딛기 위험한 땅에 로봇이 활용되는 경우도 많은데 이 로봇은 조금도 의지하지 않는다.
이 치타형 로봇은 움직이지 않는 걸 자각하거나 피해를 입은 부품을 보충할 수 있다. 지형을 인식할 수 없기 때문에 빙도나 자갈길은 구별할 수 없지만 AI나 시뮬레이션을 통해 3시간 만에 해당 길을 걷는 100일분 가상 어드벤처를 경험하고 A 지점에서 B 지점까지 효율적으로 이동할 수 있도록 보행을 조정하며 스킬을 닦았다고 한다. 덕분에 다양한 지역에 적응할 수 있게 된 동시에 부품 기능에 맞게 효율적으로 주행할 수 있게 됐다.
돌진하듯 빠르게 달리는 모습이 인상적으로 속도는 인간이 달리는 평균보다 빠른 14km/h가 넘는다. 이 접근법을 활용하면 물리적으로 본 적 없던 모든 객체를 안전하게 처리하도록 고속 학습이 가능해질 전망이다. 예를 들어 자율형 드론을 시행착오로 학습시키기 위해 보내는 게 아니라 안전한 시뮬레이션을 통해 악천후를 비행하는 방법을 가르칠 수도 있을 것이다. 관련 내용은 이곳에서 확인할 수 있다.