

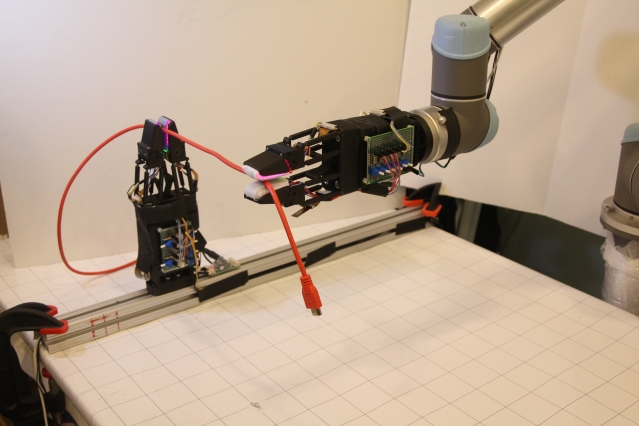
MIT 컴퓨터과학인공지능연구소 CSAIL이 가늘고 긴 케이블도 섬세하게 조작할 수 있는 인간 손가락을 본뜬 로봇 집게를 개발했다.
실이나 철사 등 길쭉한 물건을 묶거나 유연한 걸 다루는 건 귀찮은 일이다. 이런 섬세한 작업은 로봇팔도 버거운 일로 지금까지는 고정장치를 사용해 천천히 로봇을 움직이는 방식으로 작업을 해왔다. 연구팀은 기존에 어려웠던 섬세한 작업을 인간의 손을 본뜬 로봇 집게로 해결하려 했다.

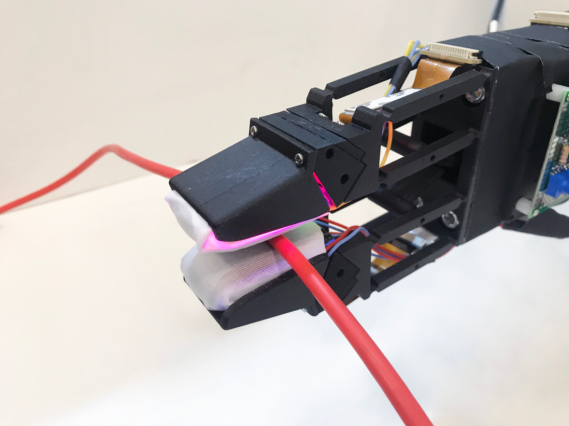
이번에 개발한 로봇 집게는 인간의 엄지와 검지 같은 소프트 그립 한 쌍으로 이뤄져 있다. 손 끝에 닿는 부분에는 카메라가 포함된 고무 촉각 센서를 탑재했다. 물체가 손가락을 슬라이드할 때 센서가 마찰력을 측정하고 그립 강도를 조절하거나 물체가 손가락에서 떨어지지 않게 집게 움직임을 수정할 수 있다.
공개된 실험 동영상을 보면 집게가 USB 케이블을 잡으면서 끝을 찾아 이어폰 케이블을 끌어다 대어 플러그를 꽂는 등 사람이 일상적으로 하는 행동을 훌륭하게 수행한다. 앞으로 케이블 배선이나 장애물을 통과하고 플러그를 삽입하는 등 더 복잡하고 섬세한 작업을 할 수 있게 할 계획이라고 한다. 사람의 손으로 만드는 것 같은 섬세한 작업이 가능하게 되면 로봇팔 활용 폭도 넓어진다. 일상 뿐 아니라 수술할 때 봉합 등 의료 현장 활약도 기대해볼 수 있다. 관련 내용은 이곳에서 확인할 수 있다.
