

GE리서치(GE Research)가 개발한 소프트 로봇이 미 고등연구계획국 DARPA의 언더마이너(Underminer) 프로그램에서 250만 달러 상금을 획득했다. 이 프로그램은 군사 환경에서 신속하게 터널 굴착을 하기 위해 만든 것이다.
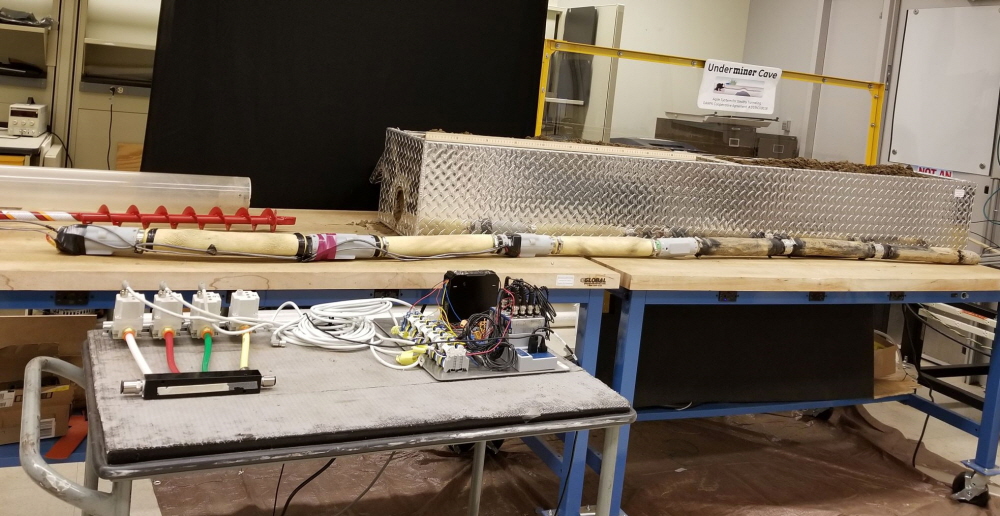
GE리서치는 이를 위해 생물학적 영감을 통해 만든 거대한 소프트 로봇으로 거대한 기계식 지렁이처럼 서서히 진행할 수 있도록 했다. 로봇 근육은 무척추 동물에서 발견되는 유체로 채워진 구조인 정역학적 골격(hydrostatic skeleton)을 모방해 디자인한 것이다. 이 로봇은 전진할 때 큰 역할을 하는 게 인공 근육으로 다양한 지하 환경에 적응할 수 있게 만들었다. 이 디자인은 좁은 공간에 침입 능력을 수반하면서 다양한 동작에 자유도를 제공한다.
또 다른 성공 열쇠는 지하에서 자율 기능할 수 있는 적절한 센서를 통합하는 것이다. 이런 상황에서 로봇을 원격 제어하는 건 어려울 수 있기 때문. 연구팀은 이 터널 시스템이 지하에 위치해 있기 때문에 로봇이 적절한 위치로 이동하고 터널을 파려면 자율적으로 움직임을 감지할 수 있는 기능을 포함해야 한다고 설명한다. 연구팀은 이를 위해 제어와 AI 센싱 전문가를 모아 새로운 기능을 통합했다.
물론 이 프로젝트의 완성까지는 갈 길이 멀다. 최종 목표는 500m 터널을 초속 10cm로 굴착하는 로봇이다. 동영상은 실제 속도를 4배 고속 촬영한 것이다. 관련 내용은 이곳에서 확인할 수 있다.
