

스탠포드대학 연구팀이 소형 4족 보행 로봇인 스탠포드 퍼퍼(Stanford Pupper) 제작에 필요한 부품이나 소프트웨어 등을 공개하고 제작 방법을 자세하게 해설하고 있다.
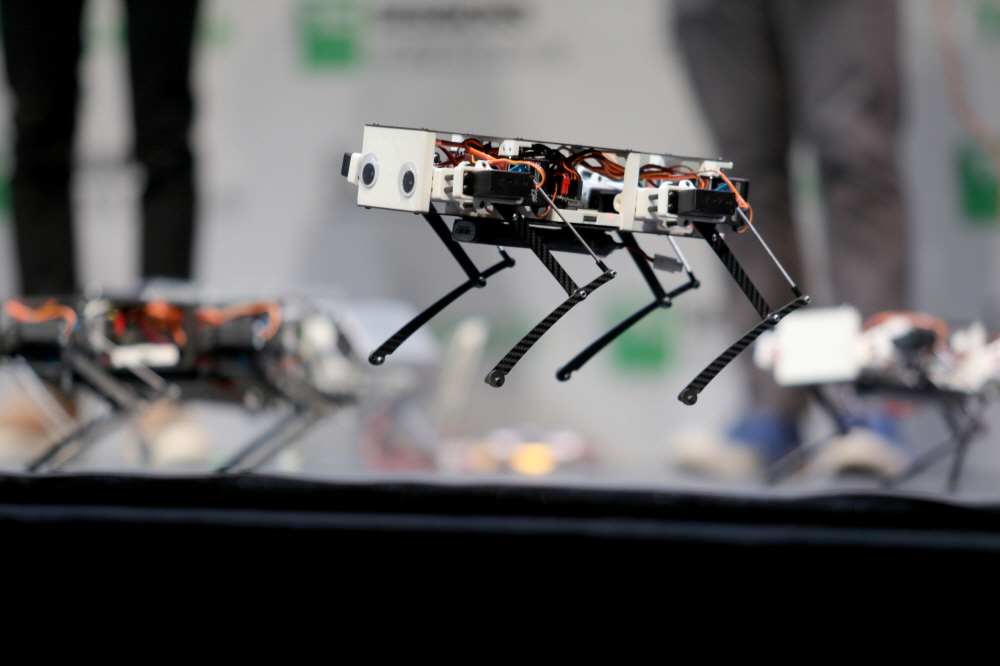
스탠포드 퍼퍼는 목 없는 개를 닮은 4족 보행 로봇이다. 다양한 움직임이나 달리기, 그 자리에서 회전도 할 수 있다. 다리를 구부리거나 엎드리거나 점프도 가능하다. 특정 발만 굽혀서 몸을 비스듬하게 하는 동작도 할 수 있다.
이 로봇은 자작을 전제로 설계한 로봇이다. 조립용 부품에 들어가는 금액은 600∼900달러 사이. 기본은 라즈베리파이, 운영에 필요한 플레이스테이션4 전용 컨트롤러인 듀얼쇼크4 등을 이미 갖고 있다면 그만큼 필요 비용도 줄어든다. 제작 시간은 전문 지식 유무에 따라 차이는 있지만 4∼10시간 가량 걸린다. 제작 난이도는 소형 쿼드콥터 드론을 만드는 수준이라고 한다.

스탠포드 퍼퍼 제작에 필요한 부품 목록은 스트레드시트를 통해 확인할 수 있는데 어떤 부위에 필요한 부품인지, 부품명과 해당 부품을 구입할 수 있는 쇼핑몰 사이트 링크 등도 함께 볼 수 있다. 물론 항목에 기재되저 있지 않은 건 일반 판매되지 않는 것. 3D프린터로 출력하거나 전용 구입처에서 사야 한다.
조립설명서는 다리와 몸통, PCB 3가지로 나뉘어져 있다. 조립 시연 동영상은 유튜브에 공개되어 있어 시각적으로 조립하는 방법을 배울 수 있다. 소스코드와 설치 방법은 깃허브에 자세하게 설명되어 있다. 관련 내용은 이곳에서 확인할 수 있다.
